|
. P" D7 W$ e D/ |( B0 ^ 我国很早就开展了UUV(水下无人航行器)装备和技术的研究。针对远程运载、水下防务、信息对抗、大坝及水库检查到水下打捞等应用领域,我国对大型、中型、小型和微型UUV都进行了深入研究,有很多成熟的型号。
+ J* o+ ^( _; P( Y! D$ q1 j 例如,我国研制的MerMan-100型AUV配备有中科院声学所研制的声学设备,主要针对海洋监测,水质检测,军团协作作业,母船、港口和航道防务等使命任务设计。该AUV的技术特点是采用模块化设计思路,根据不同的作业任务增减不同作业模块,有利于便携作业。海豚一号是一种小型AUV,搭载浙江大学研制的合成孔径声纳,主要用于探测水下小目标和掩埋目标。该型AUV的实物图如图所示。 ' G: [* G. g" N% w

3 s) [4 ?3 @( ?! l+ e
▲ 海豚一号 AUV 的实物图
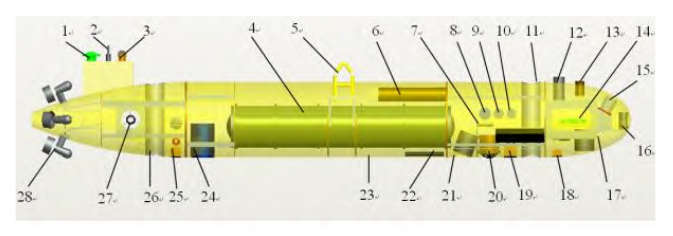
8 p& v. ~$ r1 X# A- n 一种典型的AUV组成结构如图所示。
( y5 i. w7 n) ` 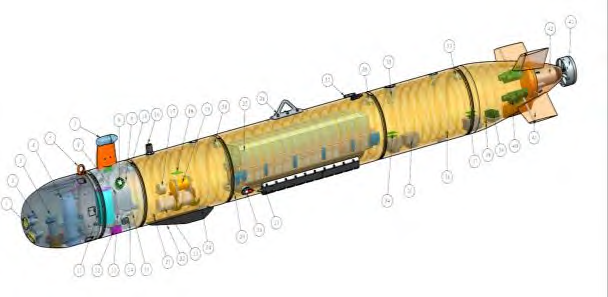
/ `5 |- y# z, ]6 g/ B
1.避碰高度计,2.水声应急信标,3.应急抛载,4.深海相机,5.拖曳环,6.中控,7.北斗示位定位装置,8.调试口,9.交换机,10.快速对接装置,11.惯导,12.DVL换能器,13.DVL控制盒,14.导航控制段漏水报警板,15.深度计,16.水声通信换能器,17.水声通信控制盒,18.声纳存储处理板,19.闪光灯电源盒,20.快速对接装置,21.载荷段漏水报警板,22.闪光灯,23.侧扫声纳电子舱,24.闪光灯入舱件,25.二次锂电池组,26.起吊环,27.充电口,28.快速对接装置,29.能源段漏水报警板,30.声纳入舱件,31.侧扫声纳换能器,32.电源开关,33.快速对接装置,34.继电器板,35.仪器电电源模块,36.载荷拓展段漏水报警板,37.艉部单片机板,38.推进段漏水报警板,39.舵机控制器,40.舵机,41.舵板,42.主推电机,43.推进器 # x9 G# l) T+ H6 I
▲一种典型的AUV组成结构
/ C/ A" C6 Q& C1 N( K4 I/ a 此外,我国还研制出一款小型搜救ROV,广泛地应用到各类抢险救灾领域。该ROV灵活机动、抗流能力较强。该ROV采用了扁平的立方体外形,利用光缆对它进行操纵。该ROV装载的是美国的DIDSON声纳,该声纳采用了声学透镜技术,成像质量好,分辨率高。该ROV由于小巧灵活,可以适应浅近海的各种复杂地形。同时,它具有较高声学成像质量,所以它可以高效地执行各类复杂的搜索与救援任务。 * d# H5 W) l# L
国内某研究机构还研制出一款大深度AUV,它主要用于大深度水下目标探测与搜救任务。该型AUV可以在6000m深的海域进行至少24h的目标搜索与探测。该AUV采用的是较先进的十字分布四桨推进,如图所示。 2 ~7 W- }- g# d }
* u+ L' b: k. C6 x; e" ?3 O& e 1-卫星定位装置天线;2-电台天线;3-频闪灯;4-耐压舱;5-吊钩;6-侧扫声纳电子舱;7-深度计;8-水声通信设备电子舱、9-水声定位设备电子舱、10-定向导引声纳电子舱、11-垂直推进器(前)、12-水声通信设备换能器、13-水声定位设备换能器、14-CTD、15-抛缆装置、16-前视声纳、17-定向导引声纳换能器(水平阵)、18-上浮抛载装置、19-下潜抛载装置、20-DVL、21-水下相机闪光灯、22-定向导引声纳换能器(竖直阵)、23-浮力材料、24-水下照相机、25-平衡抛载装置、26-垂直推进器(后)、27-尾部横向推进装置、28-尾部主推进装置
3 A# N5 V% c4 V! R+ w1 N) | ▲某型大深度AUV的组成结构
7 [. q4 {3 H( o% Q7 q2 d) A5 q 
3 k1 }+ c+ }; _3 _$ S- L) x, e ▲某型大深度AUV的实物图 2 `/ a4 ^- L, H0 p7 [" }
该AUV的技术特点主要包括:
, | H H# Q6 u" T: M 1)深海水下目标自主搜寻与探测系统的功能定位要求,基于模块化设计技术、轻质结构设计技术、组合导航定位技术等。该AUV提出了深海水下目标自主搜寻与探测系统总体技术方案,具有搜寻效率高、信息交互实时、重量轻、对母船依赖性小等特点。为深海遇险目标搜寻、探测与定位提供基础平台技术,为救助打捞工作提供支撑。
: ?# X% K8 M, K6 h6 _: D( Q' d 2)基于实时获取的海底声纳图像进行自动目标检测,提高单次水下任务中目标探测效率,同时基于AUV的惯导信息和定位信息,将扫描的声纳图像合成为带地理信息参考的海底图像,为救助打捞工作提供数据支撑。
7 V" P& \8 J6 f! w 3)声信标定向引导声纳技术充分利用声信标信号,首次提出将小尺度深度直线基阵作为水下航行器作业引导声纳接收传感器,实现深海声信标远距离测向,将大大延伸水下航行器探测搜寻声信标作业范围,使水下航行器作业能快速搜寻并锁定目标,对提高水下航行器作业效率意义重大。 , e/ p6 I9 v& z8 R+ [4 k
该AUV的技术难点主要包括以下几点: 1 k o4 H, _& Z( i
1)大深度耐压材料、结构和设备。很多常规设备和材料无法承受6000米的大深度压力,所以一些耐压技术需要在借鉴“蛟龙号HOV”的相关经验,进行自主探索与突破。 3 C3 `0 ^4 ?$ E' q( m5 {
2)多声纳设备的搭载及兼容技术。AUV需要搭载深海地貌、地质探测传感器。各种任务传感器的合理选择、优化配置及正确使用,决定了深海AUV的功能实现情况和整体性能优劣,对AUV搭载的所有任务传感器以及各种声学设备进行合理的架装与集成应用设计,是AUV方案设计中的重要环节。同时,由于多种传感器同时工作,极易产生相互干扰的问题。在研制中,将采取以下措施:(1)在满足总体功能要求下,对传感器物理位置进行合理布置,减小相互干扰;(2)对声设备使用频率尽量错开;(3)对声设备采用声同步装置控制,减少相互干扰。
" ]4 k6 o/ T3 v& W6 m8 s0 k' c 3)深海导航定位精度:深度信息的融合和校准。由于此AUV的深度变化范围大,所以在导航算法中必须融入深度信息。把深度计测量得出的深度信息发送给惯性导航装置进行有效的融合才可以提高定位精度。另外,大深度航行时无法利用卫星定位系统进行校准,必须依赖水面的声学定位系统来进行校准。声学定位的精度比卫星定位系统低,同时声波还有一定延时需要补偿。所以,深度信息的融合和对INS的校准都是该AUV的技术难点。
. C2 p3 ?) |. N; f! q" Z' g* h 4)声学图像成像质量和后处理算法。该AUV主要用于目标从探测与搜救,所以对声学图像成像质量及后处理算法有较高的要求。为了提高成像质量必须对AUV的姿态和运动参数都进行较精确的控制。同时还要引入对图像的亮度、清晰度和对比度的增强算法来提高图像质量。为了进一步提高目标识别的可靠性,该AUV还搭载了光学探测设备。在光学图像信息的帮助下,进一步优化声学图像的后处理算法,可以有效提高目标探测和识别的成功率。所以,声学图像成像质量和后处理算法也是该AUV的技术难点。 9 ~2 _: r4 q" e+ E6 T+ Q/ H- e
下面,再介绍一款最早可以实现水下精确导航的国产AUV,如图所示。 & F q( z1 o% ]4 k d% ?0 ]

9 f o: t, ^0 v( a2 n ▲某款AUV实物图 & k5 P: L$ s7 a' [/ w
该款AUV的指标为:重量(空气中)≤40kg、体积≤Ф240×17000mm;最大速度5kn;定位误差≤15m(RMS);作业水深≥180m;使用海况≤3级;抗流能力≤4kn。 ( [; ?1 k7 g" q0 ~; K
下面,再介绍几款ROV产品。国产的某款警用的小型ROV主要用于水下安防和反恐等。该系列ROV搭载的是加拿大出产的高性能声纳,可以对水下较小的可疑目标进行探测识别。目前,该系列ROV已成功地运用在运动会和大坝的安防工作中。 0 L8 z& i9 k# ?$ A
某款国产的深海作业ROV主要用于实时水下声纳探测、水下光学观测、打捞水下沉物、处理可疑目标等,如图所示。
/ s: U2 V7 S1 Z: ~0 E. [: t* D! N 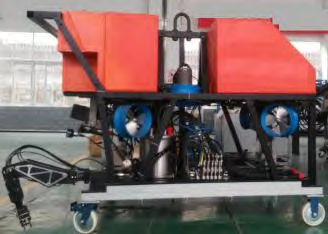
6 @6 L% s1 e2 {+ w9 e3 f
▲某型深海作业ROV的实物图
0 P. N5 m- d5 t! Q0 Y, V: E 它的主要技术指标为:深度≥1200m;缆长≥1500m;最大水平前进速度≥2.5kn;最大作业距离≥600m;重量≤1300kg;前视声纳探测距离≥180m;光学观测能力为2路水下电视(含水下照明灯4个);作业能力为5功能和7功能机械手各一个。
) \7 g/ \7 l, f1 D$ ~ 某款两栖ROV产品如图所示。
' D, P* q; g# Q 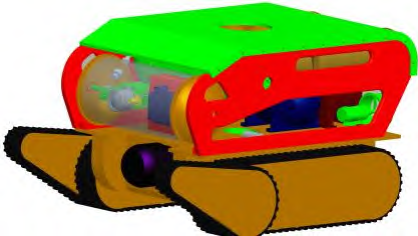
$ l4 J" E3 x9 q9 X4 ]+ q" m, l5 M- ] ▲某款两栖ROV
$ p7 U w7 L6 K 该款水陆两栖ROV的指标为:重量≤120kg;续航力≥8h;最大工作深度≥100m。该型ROV机器人可水陆两栖机动、长距离实时操控,能在黑暗、复杂的水下环境中完成环境观测、搜救、水下通讯等任务;可以建立水下被困现场与水面指挥系统的双向通讯,为水面指挥系统提供救援决策依据。
" J8 w6 U% i4 E1 q) m9 e 以上就是国内目前几款具有代表性的AUV和ROV产品。下面,具体介绍几个UUV领域的关键技术。这些关键技术往往也是制约UUV发展的瓶颈技术,这些技术的突破往往意味着UUV技术的进步。这些技术包括: ! Y3 S$ l. b1 A; i
1)总体技术。该技术是指UUV的舱段设计,内部设备与框架的布局配置,重心、浮心、中心的计算,稳定性和操纵性的分析,电气连接与穿舱件的布局,等等。同样的一批设备通过优化布局与配置可以使得UUV更加稳定,以及更好的操控性。所以,UUV设计前通过先进的总体技术可以达到事半功倍的效果; % l& }& k+ T2 c4 U \5 e
2)能源与推进。目前常用的能源为一次或二次锂电池。燃料电池、核动力等是未来的发展方向。最常用的推进方式是推进桨和舵机。近年来,十字舵、X形舵、泵喷和大侧斜桨、低速单叶桨等技术被引入到UUV中; 1 U" k) U% g- Y( ^1 n% d
3)导航与水声通信。AUV常见的导航方式为高精度光学惯性导航装置(惯导)与多普勒计程仪进行组合导航。ROV常用MEMS惯导和水声定位装置进行组合导航。基于半球谐振陀螺和旋转调制技术的高精度惯导是未来的发展趋势。水下通信最大的问题是丢包与延时。近来来的一些新的高速大宽带水声通信技术也被逐渐引入到UUV中; ; E- u+ m' d i
4)低噪声与高隐蔽性。对于军用UUV,静寂性十分重要。低反射截面的外形、消声瓦、吸声材料、吸声涂层、低噪声推进(例如:泵喷,等)、低噪声惯导(例如:半球谐振惯导、光纤惯导,等),这些技术都已经在UUV的研制中得到一定的应用;
$ ?+ A% M4 j4 ]7 N) {9 m# S: | 5)外形设计与外壳加工。一个优化后的外形意味着较低的阻力,从而可以节省能源提高航程。外形主要分为迎流段、平行主体段和去流段。迎(去)流段舱体由迎(去)流壳体、内部加强筋、各类孔座和艉端盖等组成。迎(去)流段壳体的线形一般为样条等各类复杂曲线,且其上开设了各种孔座,所以其流体力学分析很复杂,一般采用有限元软件对其进行仿真计算。壳体除了承受内部各种设备载荷的重量外,还要承受外部强大水压的均布载荷。所以其材料选择和加工制作工艺也十分重要。传统的外壳通常使用铝合金,近年来钛合金和碳钎维等也被应用于UUV的外壳加工中; ( [1 D8 ] I# r6 }! ~# a; {
6)浮力调节与应急抛载。常用的浮力调节有水舱、油馕、垂推、调整俯仰角等方式。常用的应急抛载为重量经过仔细核算的铅块或铁块,使用爆炸螺栓或电磁阀等方式实现抛弃;
9 @& x: z$ A! S3 a2 W2 \" r9 M 7)布放与回收。常用的布放与回收方式为吊车吊放及回收。近年来,滑道布放、小型AUV的手抛式布放、回收网回收、打捞网回收、自动入坞等技术也得到了一定的发展。
( o; o0 t. `' B& k+ v% S1 T6 L2 ?
: E: s6 j( P# g+ |3 i1 r
8 _( N: g3 M; J$ |, @
0 T' |4 g+ k& e. r9 u | 

