|
+ t, d7 b$ s7 h9 t 大多数人都有游泳的经历,不管是在游泳池,还是在湖泊或大海中,人们都能清楚地知道在水下可以听到海浪、船舶和其他人的声音,即使在很远的地方也能清晰地听到。
5 i: e- Z3 N5 K 对于一切海洋智能装备而言,就如同无线电之于日常电子设备,无论是研发,还是使用,只要涉及到了水下设备,就很难绕开声呐。水声工程是一门非常深奥的学科,水声学的发展对提高现代海军的反潜作战能力起着重要作用,同时水声学在民用如导航、海底地质考察和石油勘探、渔业方面均有广泛应用。虽然我们无法像专门研究水声的科学家一样,对深层原理进行解析,探索海洋,了解一些关于声呐的基本种类、构成、特性、原理,将有助于我们结合使用环境、用途,更好地理解它、应用它,发挥其最大效能。
; o- a4 L$ W7 z) Y4 t/ q2 }
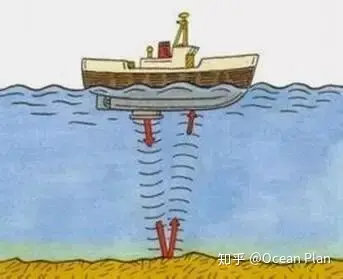
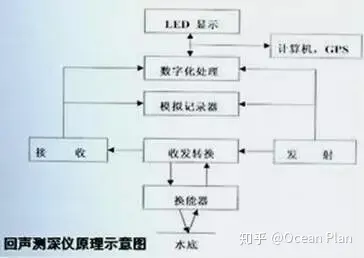
! _1 c; k F9 _! Y* z7 V “回声测深”的构思最早是法国的阿喇果于1807年提出的,阿喇果指出利用声反射可以测量海深。1820年前后,法国物理学家比尤丹特以铃声为声源,在马赛附近测得海水平均声速为1500米/秒。从那时起,人们知道声音不仅可以在水下传播,而且传播得比空气中还快。1854年,莫里采用火药爆炸时发出的声音进行了回声测深试验。1907年费尔斯取得回声测深的专利,它的原理是发射器发出声脉冲,声波从海底返回,根据声脉冲往返时间测得水深,如下图。 0 Y1 P1 s. C8 ?/ N7 U, {) N O8 C4 ]! O
3 n- ]7 _! V, i% F - E2 j u; y5 y. n5 Y$ S
到了1911年前后,斯皮茨将发射信号和反射信号记录下来,然后用机械方法将回波放大,以测量大洋的深度。1912年,英国的“泰坦尼克”号与冰山相撞而沉没,引起全世界关注。为了避免类似海难事故的发生,英国科学家里查森在客轮沉没后5天和半年以后连续报了两项专利,利用声波在水中和空气中探测障碍物(如冰山),专利中已经提出要使用有指向性的发射换能器,但他并没有继续他的工作以实现专利。 $ B R) n! y6 j8 V4 ?8 S/ F9 s
在1912年4月泰坦尼克号发生与冰山相撞的沉没事故后,范信达(1866年10月6日~1932年7月22日,加拿大魁北克省人,发明家)接到了事故电话,在人们都沉侵在事故的悲痛中时,范信达在想能不能在船上安装一个探测装置,提前就能探测到船舶周围是否有障碍物,以便采取措施,从而确保船舶航行安全。随之他研发了声呐探测装置,最早的声呐探测装置被命名为“范信达振荡器”,他既能发射声波又能接收被障碍物反弹回来的声波,经过信号处理装置分析出障碍物与船舶的距离。下面视频就是介绍范信达通过对冰山回声定位的研究,进行水下探测的故事,这也标志了水声学的诞生。
3 t# p6 o3 z# ` 与此同时,美国的费森登设计制造了电动式水声换能器,1914年就能探测到两海里远的冰山。美国科学家费森登申报了水下探测的多项专利,并制造了第一台测量水下目标的回声探测仪。当时他使用的是他自己设计的动圈式换能器,与空气中的动圈式扬声器类似。费森登用这套设备从船上发出1000Hz的低频声波,接收海中目标反射回来的声波信号,并测量信号的往返时间,根据水中的声速就可以计算出目标的距离或海水的深浅。
' v$ u0 E3 x5 x# C 第一次世界大战期间,为了探知德国U型潜艇,法国物理学家郎之万于1917年发明了装有压电石英振荡器的超声波测距测深仪,并应用了当时刚出现的真空管放大技术,进行水中远程目标的探测,第一次收到了潜艇的回波,开创了近代水声学,也由此发明了声呐。1923年,在法国物理学会50周年纪念展览会上展出了郎之万和希洽夫斯基共同研制的回声测深仪,当时总共约有3000多艘战舰装有不同型号的探测设备。 % `1 X; Z2 ~; m( ~" g9 D
$ X5 {; A3 m5 Y 1919年,马蒂制造了用笔在记录纸上记录的回声测深记录仪,并取得了专利。采用磁致伸缩的回声测深仪于1932年试制成功,它由中心装置、振荡发射机和振荡接收机组成,在中心装置中装备了产生发射脉冲、反射信号处理和自动深度记录器等关键设备。在正常情况下,回声测深仪在记录带上形成直接记录的零线和海底断面线。 2 O3 G+ h Q# F
1930年以后,利用石英晶体压电振荡的超声波测深仪投入了批量生产,在世界范围内得到了广泛的应用。随后,各式各样的回声测深仪也相继问世,根据测深的范围,先后出现了浅水回声测深仪、中深度回声测深仪、深水回声测深仪等固定系列的回声测深仪系统。在第一次和第二次世界大战期间,海洋声学有了显著的发展,回声测深技术发展迅速,并首先应用于详细调查海底电缆路线方面。
* @+ Z, [- M! ?6 _- n/ Y; E 1960年开展的印度洋国际联合调查也开始使用了精密回声测深仪。回声测深仪的出现,可以说是海洋测深技术方面的一次飞跃,其优点一是快速,二是可以得到连续的记录。
( H! H7 p+ x( t( q1 r5 \$ c% j 9 \* X+ p1 U. M3 Y
随着海洋的开发,水声学在海洋资源的调查开发、对海洋动力学过程和环境监测、增进人类对海洋环境的认识等方面的应用也在不断地扩展与推进。现代水声学的研究课题涉及面很广,主要有:新型水声换能器;水中非线性声学;水声场的时空结构;水声信号处理技术;海洋中的噪声和混响、散射和起伏,目标反射和舰船辐射噪声;海洋媒质的声学特性等。特别是水声学正在与海洋、地质、水生物等学科互相渗透,而形成海洋声学等研究领域。
! i# Z2 S% Q& T0 b* H" r 水声换能器是发射和接收水中声信号的装置,应用最广泛的是电声转换的水声换能器,即转换电能为水中声能的水声发射器,以及转换水中声能为电能的水声接收器(即水听器)。水是声阻抗率较高的媒质,因此要发射较大声功率就必须有较大的力。常用的水声换能器按其基本换能机理分为可逆式和不可逆式两大类。可逆式(可作接收器)的有:电动、静电、可变磁阻(电磁)、磁致伸缩和压电水声换能器。不可逆式(不可作接收器)的有:调制流体(流体动力)、气动(如气枪)、化学能(如信号弹)、机声(如扫水雷声源)等。
- r0 C9 }9 w; R9 f) Q. X 8 N4 @$ o2 \% u9 l% X# k/ G5 k) u
水声参量阵分为参量发射阵和参量接收阵两类。它利用声波在水内传播时产生的非线性相互作用。如发射器同时发出两个频率相近的高频波 (又称原波),由于非线性相互作用,则还产生差频波及和频波,这也可看作为一种新的转换概念,参量发射阵利用的就是差频波。 # r! e3 B- w! `
参量发射阵可分为原波饱和与无饱和两种情况(饱和是当声波的振幅足够大时产生的,这时,近场原波的振幅不再随声源振幅的增大而增大),有四种典型模式:无饱和近场吸收限制、无饱和远场球面扩展限制、饱和近场限制、饱和远场限制。对无饱和的两种模式,差频波的声压都正比于两原波声压的乘积。参量阵的主要缺点是效率很低,它的独特优点是可以利用小尺寸换能器获得低频、宽频带、低旁瓣或无旁瓣、探照灯式的尖锐波束,应用于需要低频高分辨率探测中。
1 c1 q1 l; j9 U" d# ] 参量阵已进入实用阶段,特别适用于海底浅层地质的勘探、水下埋藏物的探测、浅海特定简正波的激励等。近年来,参量接收阵近来也受到注意,其工作原理与参量发射阵相同,非线性相互作用在高声强的泵波和待接收的声波之间发生,在泵波的声轴上接收差频或和频信号。由于声学参量接收阵能在强噪声背景下检测弱的有用信号,且其接收指向性尖锐,具有常规阵无法比拟的优势,参量接收阵的研究和应用正受到了越来越多的关注与重视。
3 W2 H! v2 u& C" k# X' I: N * i6 W- d6 W* U# I$ l
Navygator 系列潜水导航电脑是创新型的潜水设备,采用先进的水声定位导航技术,实现同群组内设备之间的五大功能:
4 l: u% X9 s& N' Z& k 1、水下定位 2、水下3D导航3、SOS报警4、潜水员异常状态提醒5、水下无线信息收发
; k9 d/ }4 o4 s2 D' z8 H4 e( T 1 D+ v$ A3 k K5 G! w
Ocean Plan拥有专业的研发团队和丰富的产品开发经验,未来也将在水声通信领域上,为更多不同需求提供产品解决方案。 # m; u, S% B- d: z1 c4 }) d
3 s/ l' P6 O3 u. q
: E* P4 I) g* G; O5 i3 m/ }
# x6 Y( r0 _* ]1 p+ I& q# N- d( R
9 ^/ x0 X5 D% b7 p! Y* q |