|
4 |! ^) v; j8 w* q% C- c# n0 n
目前近海测量项目中,探测海缆的方法主要是侧扫声呐、浅地层剖面仪,磁力仪和海缆仪。浅地层剖面仪能探测海缆的位置和深度,但严重依赖于底质情况,大多数时候,底质与海缆反射一样,难以从地层反射中分辨出海缆。磁力仪和海缆仪只能探测出海缆的平面大概位置,受海况和环境条件影响大,有一定的机率找不到海缆。Teledyne HydroCPT (TSS )350能精确地探测出海缆的平面位置和埋藏深度。下面主要说说这款设备,不知道有没有读者用过,博主心而往之,但从来没有用过。 : T! H8 O1 b3 W) h9 i
TSS 350海缆检测系统是海底电缆探测的专属系统,相较于其他勘察设备(如磁力仪、多孔径声呐等),具有探测精度高、受环境因素影响小、不受海缆规格局限等优势。传统探测 # Y, Q' E$ n) P5 H. O- X( m5 p
设备对于海底电缆敷设区域土质、海缆规格大小会有一定要求,局限性较大。而TSS 350海缆检测系统的原理是通过感应输电电缆产生的交变磁场在空间分布上的几何特征,计算出电缆的位置和埋深数据,不受外部因素影响,局限性较小。 % z! s+ D# ^* n9 l2 y% i6 x; w: w
TSS 350海缆检测系统对带电和非带电海缆都可进行探测,对于不带电海缆,需预先给目标海缆加载一个特定频率的电流信号,通过探测该电流信号产生的磁场分布,获得海底电 缆的路由位置和埋深,此方式多用于故障电缆的故障点定位。
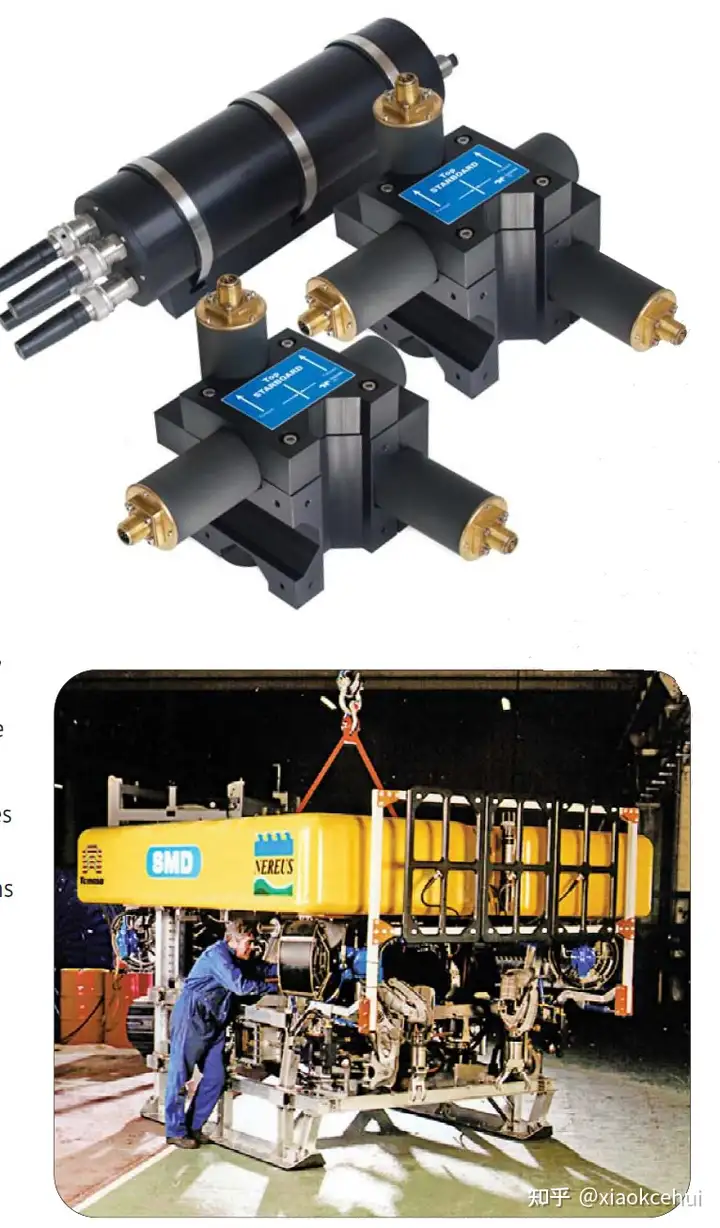
7 U# D0 K. C7 X8 Y TSS350由2组三轴垂直线圈和1个电子舱组成,见下图所示。 ( g% M+ D3 H# V4 O$ W
8 t2 A _9 |; x2 i+ F/ `
1、TSS 350海缆检测系统的探测原理和工作方式 7 ]8 l$ W( b c
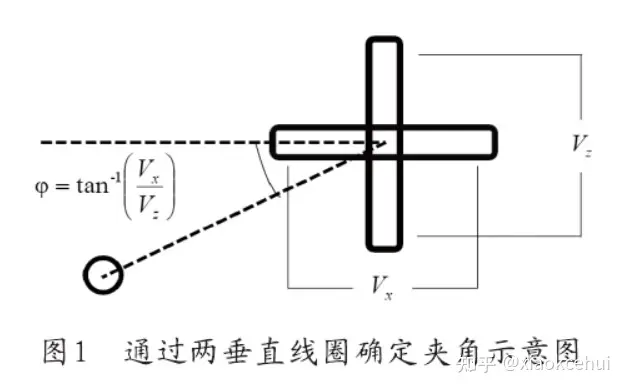
根据电磁感应定律,带有交变电流的电缆在动力线芯周围会产生同频率的交变磁场,当TSS 350感应线圈靠近该交变磁场时,便会在探测线圈上产生交变电压。由于单个分量
& M6 \7 V! M/ W7 D2 f 的线圈与电缆成平行位面时输出电压为0,当处于垂直位面时输出电压为最大值,在两者之间有夹角时则介于中间。因此当使用一组相互垂直的线圈(x分量、z分量)进行探测时, 由不同方向上的线圈产生的交变电压值即可计算出线圈组和电缆之间的夹角φ(见下图)。1 I# ~% p4 {& t; H
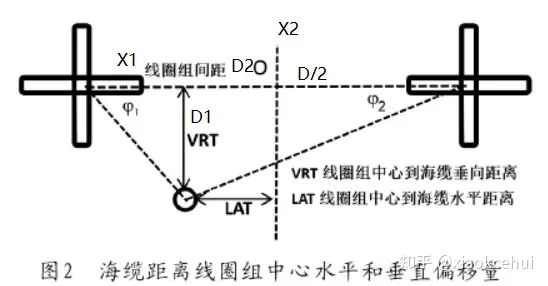
7 K( { x( P3 A1 H; d. j! j TSS 350海缆检测系统包括左右两组感应线圈,根据两组线圈之间的已知距离与夹角φ,通过几何关系计算出海底电缆距离线圈组中心的水平偏移量LAT和垂向距离VRT(见下图)。通过LAT可得海缆路由位置,通过VRT与高度计数据可得海缆埋深数据。 3 ]2 e) g7 G4 G* }) N2 D0 Y9 [$ w& J
! G' X" T6 N4 ]2 }, ?
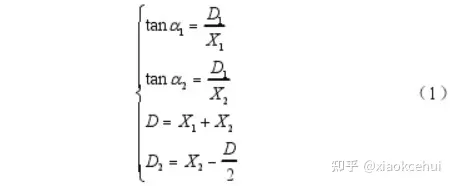
两个十字线圈组距离 D 已知,两个线圈组各自与海缆的夹角 α1、α2可由各自输出电压比推出。由三角函数关系可知:
9 Y- k( ]% x2 _& L3 k% P/ p5 M6 h I
6 y5 ]0 q; `$ d) q& h7 M 由式(1)可知,D1和 D2的具体值,进而推出海缆埋设深度。 $ t! O S3 D6 o0 t+ E
为了确保探测的准确性,所探测的电流信号频率必须为独立存在,探测范围内不能存在与其相同或者其整数倍的电流信号,避免产生干扰。 5 a: n6 @# W/ y( l6 b
同时,线圈组两侧各有1个垂直于x-z位面的线圈—y分量线圈,y分量线圈配合线圈组来实现TSS 350系统的前向搜索功能,主要用于海缆探摸初期测线内海缆位置的搜寻。 ' S1 Q$ T, H) _
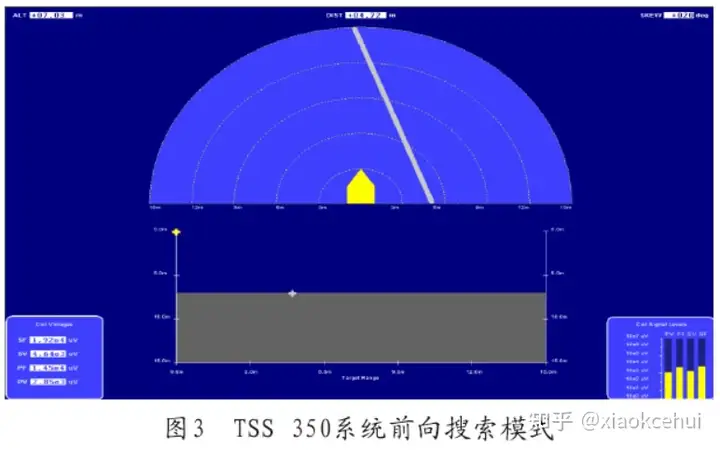
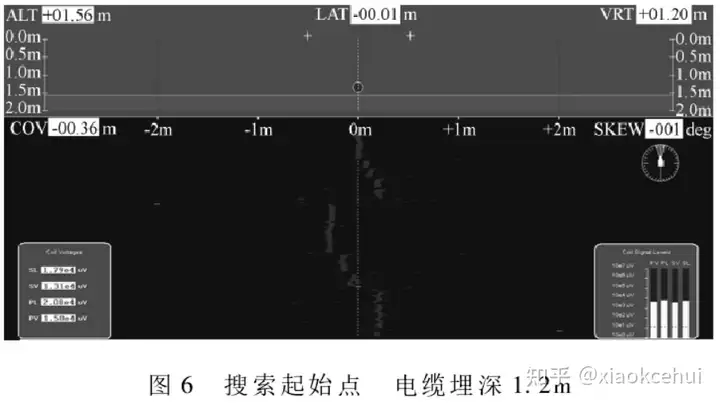
TSS 350系统工作方式主要是加载于水下载体(如ROV、拖体)上,贴近海床表面对海缆进行探测,系统运行时可选前向搜索模式和运行模式,探测初期,使用前向搜索模式于
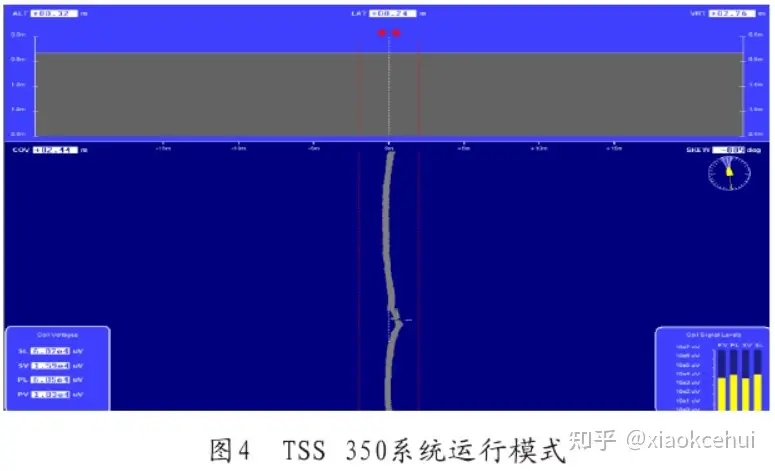
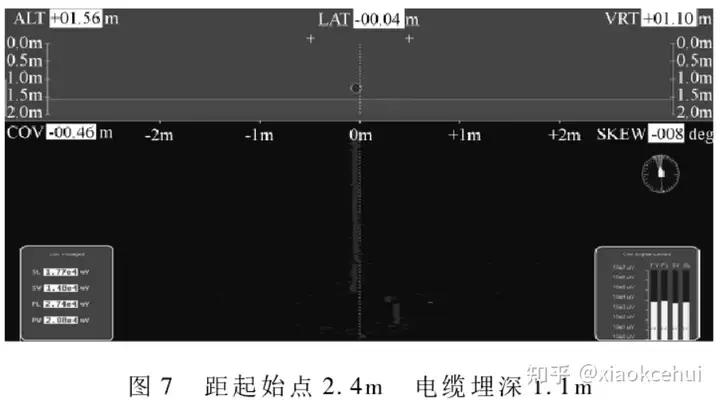
9 K1 o$ _# q; _0 c5 M. k% T% h 测线内搜寻海缆大致方位及位置,确定位置后切换运行模式,使线圈组处于海缆上方沿海缆巡线探测,并收集路由及埋深数据。 TSS 350系统前向搜索模式,线圈组会自动于测线内搜寻目标频率的交变磁场信号,当线圈组与目标海缆位置达到探测范围时,可得海缆的大致位置(见下图)。+ L# x- s# U3 Z; Y2 }
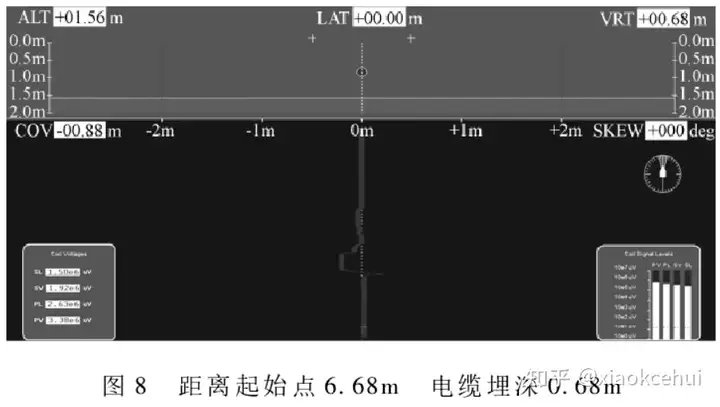
/ ^. F1 f, ?! i! _7 P 根据探测数据调整船位及载体姿态,使两线圈组连线与海缆走向垂直并处于海缆正上方,捕捉稳定信号,沿信号源巡线探测,采集海缆路由及埋深数据(见下图)。 C' R& K6 p+ p+ l4 h
, A1 s# H0 b3 e& i+ w 2、海缆故障定位
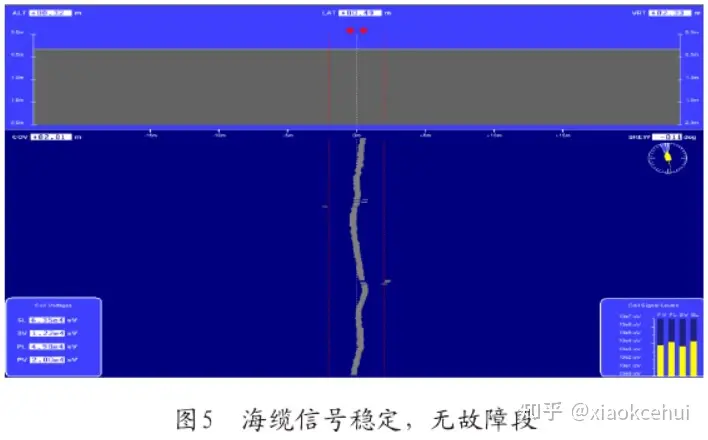
( p2 J9 J5 M8 g8 a; A4 w5 l0 _ 使用海缆故障测试仪定位大概位置,再采用TSS350进行精确定位。
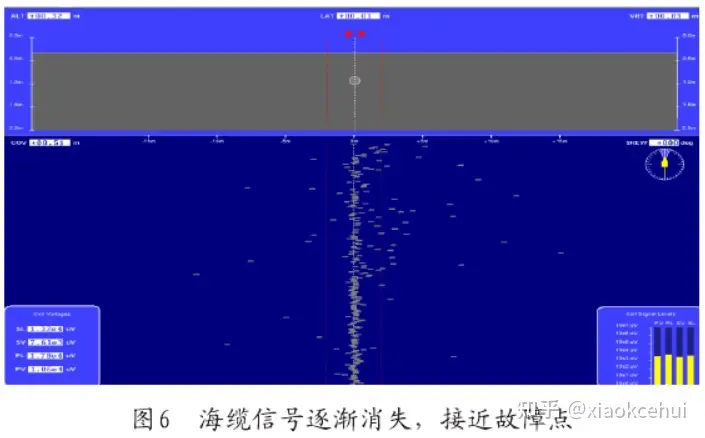
/ c* {, j& N5 c, |2 k" @' m# A: ] TSS350精确定位的具体做法:首先,对故障电缆加载一个特定频率电流信号,TSS 350系统加载于水下机器人(ROV)上,从加载信号端,搜寻海缆信号,沿线探测,稳定信号消失位置即为故障点位置(见下面无故障和有故障时图像),由TSS 350系统探测范围为左右±5m,上下±10m,可得故障点即在此范围内。
/ m% b1 D8 W; H$ N- Q3 b C3 X0 f + ~# Y! F! N) R3 C3 U
0 T0 M$ P' N! C4 y; H" ~: k8 z( [
3、埋藏深度及其精度 0 ` m* q1 g* }* @$ V
线圈到达目标电缆的上方后,启用 TSS350 系统的电缆路由追踪模式,实时显示电缆与线圈组的相对水平位置和垂直距离 ( 见下图)
# s# }. T( g- h7 y- s
. r: U4 c8 A+ P4 b6 L$ K1 u ; [4 d: t0 ~$ f& r
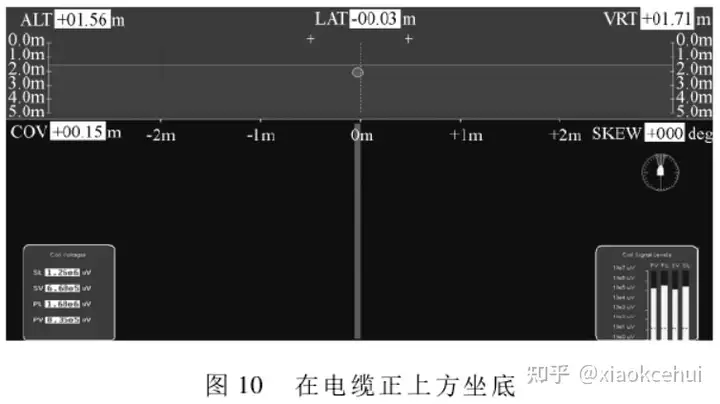
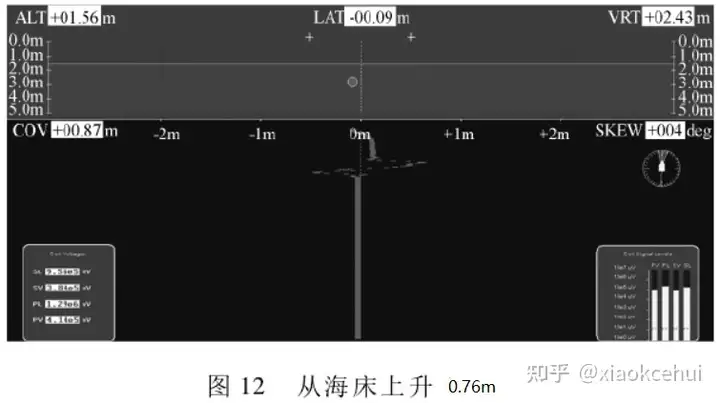
在沿电缆路由向前追踪的过程中,不断根据探测得到的线圈组与电缆之间 的 关 系 调 整 线 圈 组 的 位 置 至 电 缆 正 上方。记录线圈组中间位置即为电缆坐标,线圈组与电缆的垂直距离减去其与海底的距离即为电缆的埋深。试验 时 直 接 将 线 圈 组 置 于 海 床,追 踪 效 果 见下图。
\. z2 R$ U# Q
3 u' j9 I/ N0 G+ A5 y: F7 | ' C7 ?5 K) i0 j, H$ }% O
为了测试 TSS350 系统对海底电缆埋深的探测精度,采用升降的方法对电缆沟下方埋藏的高压电缆进行了一系列的升降测量。探测结果见下图。
; X; e2 X$ ?; E" J1 i' P5 U
3 [# L9 s) W% o* T! D
8 v; o6 v t, w$ U6 r( \2 L$ V
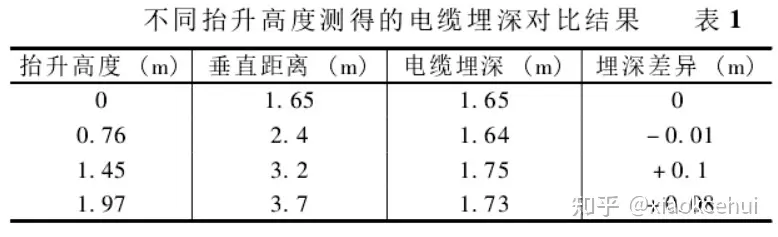
! @) g7 d+ K/ n X. s. p9 F 每次抬升的高度、测得的埋深数据及抬升后与地表测得的深度差异见下表。 / j% R) C9 h" U% q7 Y. D
) B+ D8 v4 r, [ 结果表明,TSS350 能较为准确地探测到电缆与仪器天线的垂直距离,从而确定电缆的埋深,精度在 0. 1m 左右。
2 U s+ _4 ?9 J( ]8 E9 u; I 参考文献
+ i o5 N" c6 a- B$ k ~! g TSS_350系统在海缆探测中的应用_高红武 ) u" Y7 n) X& R
TSS350系统在海底电缆探测中的应用_曾亮
+ o/ e+ W' m3 U$ ~ TSS350在琼州海峡跨海...底电缆带电检测项目中的应用_高东明 ! E4 s3 d: t7 K- ^
https://www.aisoutu.com/a/325401 3 e- A; t' c U
http://www.gqsea.com/h-nd-146.html
8 x/ _. S7 z# H, L0 Q https://str-subsea.com/imagenex-837-delta-t-multibeam-profiling-sonar
6 u) y& _7 B3 T/ j3 c5 N+ ?, v, w1 o- u+ H
5 G- G( ~0 j/ u4 h: `, j) J3 w9 W% v3 u, ?
, [7 |0 }" p6 ]: [4 ]; b
|