海洋中蕴含着丰富的自然资源和能源,有用于发电的风能、波浪能和潮流能,还有用于养殖的渔业资源。随着人们对生活水平需求的不断提升,海洋渔业的市场也在不断扩展。为了满足不断增长的资源需求,越来越多的国家将养殖场地由海岸转移至深海,而随着海洋平台技术的不断发展,基于海洋能源平台建立的“海洋牧场”是推进养殖产业转型发展的重要方向。, i; b6 k" N' Y
近年来,越来越多的国家重视发展多功能海洋平台,以半潜式海洋平台结构为基础,综合风能-波浪能-潮流能海上互补发电海洋平台,深水钻井平台、海洋牧场都是国际上主要探讨和研究的话题。2012年,我国第六代深水半潜式钻井平台投入使用[1],其最大作业水深达到2451m。2011年,日本开发制造了“Wind Lens”平台[2],整个平台安装了2台风力机波浪能装置和太阳能。2018年,世界第一座半潜式智能装备海洋渔场“海洋渔场1号”于挪威海弗鲁湾海域中投放[3],整个装置具备挪威先进的智能养殖技术同时结合了中国成熟的海洋平台建造技术,总高69m,直径110m,可抗12级台风。渔场安装有2万多个各类传感器以及100多个监控设备,在鱼苗投放、喂食、实时监控和渔网清洗等方面都实现了智能化和自动化。9 \, N' U; t% b5 r( @, i
在系泊方面,KIM等[4]针对一种FPSO进行系泊系统时域耦合,分析了不同风浪下的浮体运动响应和系泊动力分析,并与试验数据作对比。TANG等[5]通过建立网箱的时域数值模型,分析破损系泊系统下网箱的运动情况及系泊力的变化。LIN等[6]通过AQWA软件对半潜式浮式平台进行水动力性能及系泊系统分析,并研究了系泊对平台水动力的影响。结合前人所研究的结论,马勇等[7]考虑了水轮机、风力机与平台的相互作用;郭小天等[8]针对潮流能发电装置在各种外载荷下的运动性能,合理地设计了适用于潮流能发电站的弹性索-锚链组合系泊系统。周丙浩等[9]利用Fortran对AQWA进行二次开发,研究风力机、水轮机与平台的耦合运动效应。
; a/ {3 |# T* ?* S- e$ o本文以“海洋渔场1号”为母型设计了一型半潜式海洋牧场养殖装置,结合海洋能源利用和渔业养殖,在海洋牧场上安装风力机和潮流能水轮机。根据平台结构设计的2种系泊系统,利用间接时域分析法进行时域水动力性能的分析。研究成果可为海洋牧场系泊系统设计提供有效依据,为未来海洋牧场与能源综合利用平台的设计建造提供参考。
) B: G/ M/ n0 O6 O' |8 M- r# h% _& e8 x8 s2 ~ [0 C0 \! A
7 _4 x( _3 r& q5 U% i4 Y
01 [* N8 E2 Y: `! x4 g5 P
计算理论及模型1 I# c& p" W! l7 h; ~! ~1 S9 ]
1.1 时域计算方法; J4 x- J1 y. Q. _) p- ~& @
对于研究浮体在波浪下的运动问题,首先需要求解流场速度势[10]。通过线型叠加入射势、辐射势及绕射势,以此来表示浮体周围流场的总速度势:0 s0 e: v+ y3 Z W6 P) M; P' Y& z
& P) k3 e0 S6 C, p) e ^5 h
式中:Φ1(x,y,z,t)为入射波速度势;ΦR(x,y,z,t)为辐射速度势;ΦD(x,y,z,t)为绕射速度势;(x,y,z)为流场中的位置坐标;t为时间。
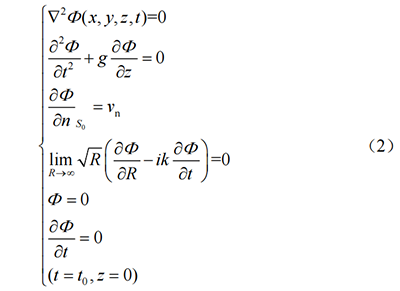
" V- _) X) @. x结合运动学边界条件、动力学条件、远场边界条件以及物体表面边界条件,最终得到总速度势定解条件,见式(2),
, r: t; E4 K" a7 ^3 g( U9 s/ @% [1 ~+ \- r
其中:n为物面法向量;i为虚数单位;g为重力加速度;k为波数,满足k=ω2/g;vn为浮体湿表面S0的法向速度;ω为波浪频率。
5 E6 ^# R( U" S式(2)为速度势的定解条件,入射波的速度势已知后,即可求得辐射速度势和绕射速度势。将浮体所受波浪力分成3种力,即入射、绕射和辐射,而入射波浪力与绕射波浪力构成波浪激励力。通过所得辐射势和绕射势,求解浮体的波浪力,进而建立浮体的频域运动方程,见式(3)。# H/ r0 Z: C- O0 C, W
5 [" V$ ]- c% e i4 c式(3)中:m为浮体质量;λa为额外阻尼系数;μij为附加质量;λij为辐射阻尼;K为静水回复系数;Ka为额外刚度系数;xi为浮体的位移;F为波浪激励力。
/ V `& R+ I* Q6 V之后将浮体的频域运动方程转换为时域运动方程。当浮体进行六自由度微幅运动时,可以把运动看成一系列脉冲运动。将浮体周围的速度势进行叠加求解。浮体运动下,流体辐射势可以表示为
" z5 T9 E) T# B7 q0 B5 L! S* z' s/ P. Q% v5 @. y K
式中:xj(t) 为浮体在j方向运动的速度或者是角速度;ψj为浮体单位脉冲运动产生的速度势,且在j方向上;χj为浮体做单位脉冲运动后t时刻的速度势。, H5 S3 R- x) [* z7 ?3 @1 b- S5 J' c
通过伯努利方程求得浮体表面动压力并进行湿表面积分,得到浮体辐射水动力和力矩:& i3 N/ U' f+ k8 N& \& C) t7 l
7 a4 a& P+ Y( k0 D
式中:mij为附加质量矩阵;Kij为延迟函数;Xj(t)为浮体在j方向运动的加速度或者是角加速度。进而推导出时域运动方程表达式为
: ], l A F' \8 Y: g. {6 ]
; H ?# ?- x3 F8 I% s式中:Xi(t)为第i个自由度上的波浪激励力;Cij为浮体静水回复力矩阵;Mij惯性矩阵。通过对式(6)换元得到:
! Z! O( u5 }1 }8 U y8 x' q
$ O; r3 L! o0 l# ]' J; m" L在求解时域运动方程前课通过面元法,获得浮体的频域水动力系数。在通过频域水动力系数求解时域运动方程的水动力系数。同时波浪激励力也需要进行频域到时域的转换,这种方法称为间接时域法。在建立浮体的时域运动方程后,利用数值方法4阶龙格-库塔求解方程,最终得到浮体各自由度时历运动数据。+ l% n5 l2 g$ u. \ r8 v- x6 l2 l
1.2 计算模型
$ Y. S. p5 ^3 |$ s$ {) m本文中的漂浮式海洋牧场养殖装置的母型是由中国船舶集团有限公司建造的“海洋渔场1号”养殖网箱,整个平台基础结构式为半潜式,主要分为四大构件:上层平台、立柱、网箱结构和下浮体。表1为海洋牧场主尺度;
# G6 a! ~# N8 d! C7 O! V
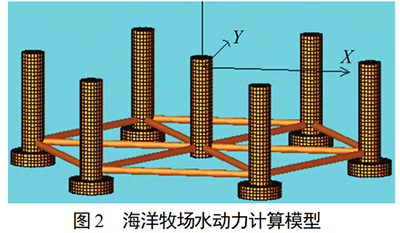
7 \! t7 X2 E' E9 x2 g图1为漂浮式海洋牧场养殖装置的总体结构图;图2为海洋牧场水动力计算模型,其中,立柱和下浮体基于面元法计算,而横撑由于属于小尺度构建,采用莫里森单元进行计算。 _ B9 [9 ]9 P- T/ Q' F
0 ^# H4 ]3 P% l& h7 H4 f
0 n" N' U X. y02* Q. i$ k# U9 Y4 D; h* [
系泊设计方案说明
+ w% X- t9 ]1 J' z2.1 环境参数
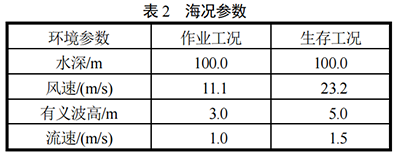
1 l. T, }2 H6 Q* A1 R! r假定本文海洋牧场所处位置为黄海,该海域接近中国重要港口城市,具有运输方便的优点。综合水文环境资料,作业工况和生存工况环境参数见表2。
8 T7 A& z' Y9 u
5 R) r. g* E! N) b( n$ W2.2风力机载荷
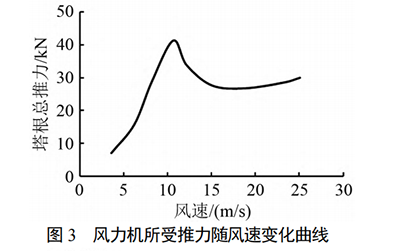
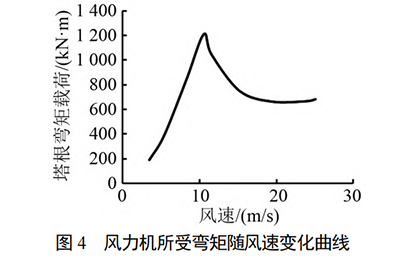
9 I1 G, S3 E5 ]本文的风力机使用沈阳工业大学开发的 200 kW 风力机,不同风速下风力机所受推力(见图 3)和侧向力(见图 4)通过查阅文献所得[11]。根据所得数据将风力机在相应风速下所得载荷按照定常力和力矩的形式加入数值模型中。) O+ ^ h# P& l f' f" n2 q) b
9 y1 y( S! a' l- M4 X: V
) s6 Y) d+ p2 u& r1 `2.3 水轮机载荷
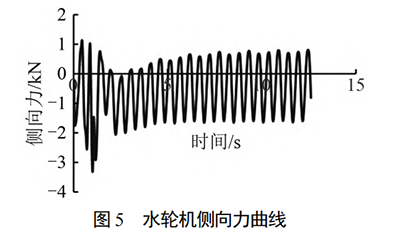
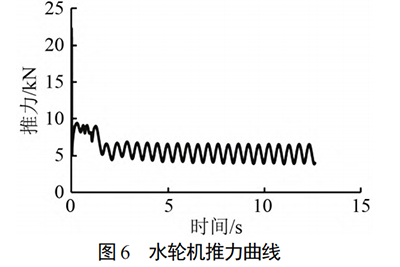
( ^5 \8 ?7 Q( v3 u6 b$ ~水轮机选择翼型为NACA0018、3叶片的 5kW 潮流能水轮机。为了确定水轮机载荷,通过STAR-CCM+ 数值模拟得到本文水轮机侧向力(见图 5)和推力曲线(见图 6)。根据所得数据将水轮机在相应流速下所得载荷按照定常力和力矩的形式加入数值模型中。7 x5 X5 U/ M) L2 i t5 l
& L2 c1 K: P$ h2 ~9 b) A
' R- N1 |5 [) E' i X( r- y
2.4 系泊设计方案 G, a) D7 z0 b; y
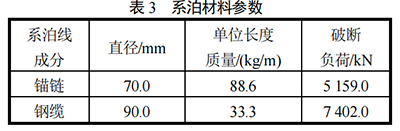
整个海洋牧场的系泊系统设计为悬链线形式。整个系泊系统的设计不仅要考虑浮体的运动,还需要考虑系泊材料的属性等性能。本文将对比纯锚链方案和锚链-钢缆-锚链组合式系泊方案,系泊材料参数见表3。
& i' F1 S7 W+ d$ w5 d+ H; @
I/ }1 ~; S' S根据海洋牧场形式,浮体的固定系泊点设置在结构物浮箱底部,每个系泊点连接两条锚链并与海底锚点连接。锚链对称分布,并且两两平行。海域水深为100m。设海洋牧场水平面中心为坐标原点,系泊线布置方式及系泊点数据具体坐标见图7和表4。- u6 w# H9 s" c9 {6 |
0 n8 _7 c1 m& ^! Q" y9 n3 v
# O" o( g' l# H& `# g! g2.5 系泊设计要求
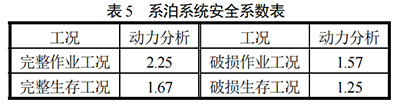
0 k( h. D# x$ D0 c" T系泊系统的设计不仅要满足浮体所规定的位移要求,还需要满足系泊线的强度要求。在作业工况和生存工况下需要保证浮体不会发生倾覆,系泊系统不会断裂等情况。中国船社级的《海上移动平台入级规范》对锚链不同状态下张力的安全系数要求见表5。
7 a4 P6 s) J0 v3 y% @" \$ e
7 o+ B: ?2 O' c* u$ |由于海洋牧场上并没有长期居住的作业人员,也没有对运动响应有严格要求的装置,因此运动响应只需要保证在作业工况下装置的正常工作,生存工况下系泊达到规定的安全系数即可。而对于合理的位移偏移量,也没有具体的设计规范,因此通过查数据以及经验,要求作业工况下,平台的纵荡和横荡运动限定在水深的10%左右。由于风力机具有自动偏航功能,横摇和艏摇对发电效率影响小,仅考虑纵摇影响。限定作业工况下纵摇角度小于5°。
1 Y1 D; D4 X7 V9 r% q5 W03. g# b, Q" e3 ^6 z" X6 M8 }2 m+ P
算例分析% W9 T% C& e( i8 h( M
在作业工况和生存工况下,分别对海洋牧场的载体及其系泊系统进行时域耦合分析。在作业工况下,海洋牧场需要考虑风力机和水轮机作业时所受推力和力矩。而在生存工况下,海洋能装置停止工作,仅需要考虑海况对平台和系泊系统的影响。分析两种工况下海上牧场的六自由度运动和系泊张力。
; H3 `- o' c; w+ p7 @, j
% [' d9 O0 ?- F" B: a3.1 作业工况结果分析# R$ k& q J' s9 T. U
3.1.1 纯锚链方案+ b Z0 v2 u3 l }7 Z# a
设计流向与风向为0°,设置不同的浪向角,研究海洋牧场在纯锚链系泊方案下3h内的六自由度运动情况以及系泊系统张力变化,统计结果见表6。$ I, Y# p& H- G- C
7 O+ [; X, w2 A# P2 e+ t$ w观察表6数据可知:作业工况下,平台在浪向角为0°时的纵荡最大,为5.68m,符合浮体位移要求。而平台在其他自由度的运动数值较小,这是由于浪向角在0°时,浪向与风流同向,对平台纵荡方向的影响较大。7 C$ a% c7 d4 ~' F& s
作业工况下,纯锚链系泊在各浪向角下的六自由度最大摇荡的时历曲线见图8,系泊系统的最大张力时历变化曲线见图9。由图8和图9可知:纯锚链系泊方案中,系泊锚链张力最大为665kN,最小安全系数为7.750,锚泊系统符合规范要求。在作业工况下,海洋牧场上的风力机与水轮机受到风速和流速的作用,在风速流速方向产生较大位移。# C/ u8 q% w! `% {( _, D7 j) j
8 f: f8 r1 d9 g
, `2 d5 ^: q: K) J- C. n3 I. V5 L3.1.2 锚链-钢缆-锚链方案: Z5 o' E6 L4 r/ T5 W
在使用锚链-钢缆-锚链进行组合系泊时,对海洋牧场运动响应及系泊受力进行分析,具体结果见表7。
* W, F } o7 M( }+ S
8 ? a$ ~( L! \4 M7 M) i8 S C) m+ w9 d" j& M1 E
由表7可知:在各个浪向角下,纵荡均有较大的运动,最大达到了11.78m,略微超过平台位移设计要求。对比2种系泊方式在作业工况下的数据,见表8。
# T5 A/ [: M& `; t4 }$ @0 p2 l6 j
4 f+ h0 N* J; }/ V对比作业工况下的2种系泊方案的数据可知:组合系泊方案相比纯锚链系泊方案,在纵荡方向的位移更大,同时系泊的安全系数也更小,而在其他方向上的位移相差不大。综合对比后发现,纯锚链系泊方案更加符合设计要求。* H/ ]- b! ?: O5 @/ H6 s5 Z
3.2 生存工况结果分析
; m0 a7 Q$ }' |8 J' k8 f" m6 o3.2.1 纯锚链方案5 N2 }: }' g% J5 |# V, V# r
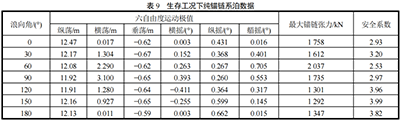
生存工况下,海上牧场搭载的风力机和水轮机停止工作,只考虑海况对平台和系泊系统的影响。海上牧场在纯锚链系泊方案下,六自由度运动最大值统计和锚链最大张力计算结果见表9。5 v* [0 X! c1 b! S
- b+ b" g$ h1 F% e+ D; V由表9可知,生存工况下,平台除纵荡以外的自由度变化较小,纵荡方向的最大值为12.47m,横荡方向的最大值为3.1m,这是由于在纵荡方向平台受到波浪作用以及风力机水轮机受到风速流速作用共同影响;锚链最大张力为2037kN,安全系数为2.53,大于最小安全系数1.67,满足要求。0 j5 A- y+ Q; s S g
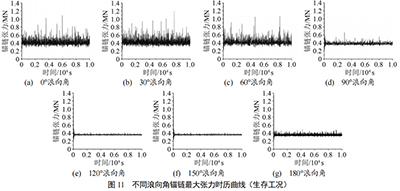
生存工况下纯锚链系泊方案在不同浪向时,平台六自由度最大摇荡时历曲线见图10。系泊系统发生最大张力的时历曲线见图11。; ]& S& v: k1 O, U: u+ D8 g
& l/ y8 I6 j* C& F9 g5 R" u4 o( m( M9 @1 U7 ^: |; V. M
3.2.2 锚链-钢缆-锚链方案
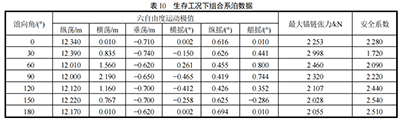
" W1 b, M0 @. x/ ], |在使用锚链-钢缆-锚链进行组合系泊时,对海洋牧场运动响应及系泊受力进行分析,结果见表10。) |) O1 N" S+ @ l# D9 | |/ C
+ d) B" G3 i! n0 R6 m由表10可发现,在各个浪向角下,纵荡运动依然最大,最大达到了12.39m,而其他自由度的运动极值变化不大。对比两种系泊方式在设计工况下的数据,见表11。5 d5 K9 t9 @% \ Q B: i
! D2 A3 H* y/ [( o" ~/ w3 U$ S' J Q, a2 f9 ?+ {
由表10和表11数据可知,在生存工况下,2种系泊方案的系泊安全系数均达到规范要求。* `& A I1 p: ^3 _; |4 k6 F2 E/ m
从浮体位移的角度来看,组合式系泊方案下的海上牧场在各浪向角时的纵荡位移要略大于纯锚链系泊方案,其余自由度运动变化幅值上相差不大;而从系泊系统角度来看,组合式系泊方案的系泊张力安全系数要小于纯锚链方案。综合考虑,本文中的海上牧场建议使用纯锚链系泊方案。
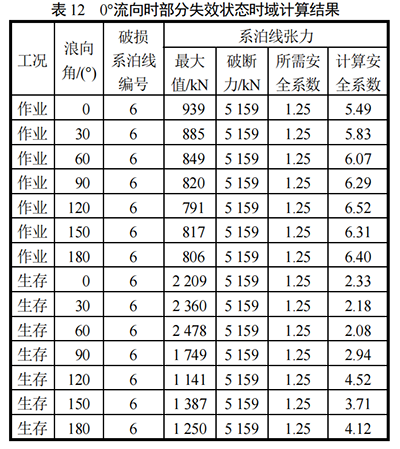
% b& {1 L" T. c1 H+ K3 z3.3 系泊系统部分失效结果分析
" H5 W1 a# |: G2 R在海上牧场在海上作业及生存时,可能会由于磨损或海底撞击等原因导致系泊系统部分失效,为了提高平台的生存性能,设计系泊系统在各浪向角时受力最大的系泊线断开,研究其他锚链是否可以支撑整个系统的生存。纯锚链系泊方案部分失效状态系泊张力结果见表12。
3 ~; I0 A* _$ g1 h' a
0 U2 B! {0 B+ V& U! d5 L5 X* v( o通过研究发现,在 6 号锚链破损断裂情况下,系泊系统锚链张力最大值为 2478kN ,最小安全系数为 2.08 ,大于所需的安全系数,验证了系泊部分失效后,在作业工况和生存工况下,剩余的锚链系泊系统仍能够保证海洋牧场的安全。
0 R1 i7 c1 C# p: t+ [3 i" d8 k- O- i" r! i+ a, j" \* J+ |6 ~/ x& w
04. ^/ l! L0 U5 J& Q/ M2 f. G, B" q
结论9 Z/ O, _& j( [7 @ J% Q
本文以半潜式海上牧场为时域计算目标,对海洋结构物在波浪中的时域计算方法进行分析。在考虑风力机、网衣和水轮机载荷的情况下,结合本文中海上牧场的结构特点和有关文献研究,设计了六点式系泊方案,设计了纯锚链系泊方案和组合式系泊方案2种系泊形式并进行了性能对比分析。通过对比分析2种系泊方案,得到以下结论:3 f% T% i0 e9 y5 m
1)在作业工况和生存工况下,两种系泊方案均符合系泊系统设计的安全要求,但组合式系泊方案下的海上牧场在各浪向角时的纵荡位移要略大于纯锚链系泊方案,系泊张力安全系数要小于纯锚链方案。综合考虑,选择采取纯锚链作为海上牧场的系泊系统。: G& h: d& N9 Z/ v3 V6 n
2)分析系泊系统部分失效状态下的性能,结果表明:受到最大张力的系泊线因意外断裂时,其余锚链在生存工况下安全系数仍大于所规定的系泊安全系数,说明该系泊方案设计具有足够的安全性。5 w1 B1 j- W1 M% A! M$ r+ B: _: ]
该文章来源互联网,如有侵权请联系删除
- H! K. V& }; @0 ^/ d# ]6 E5 r查看原文:https://mp.weixin.qq.com/s/ehfuk2vNpBxWOuuQ3mwGLg |



 D+ D X# F9 K6 C" @7 Q2 V+ ?6 ^2 G
D+ D X# F9 K6 C" @7 Q2 V+ ?6 ^2 G 6 d& E. ]. c0 p1 b5 A$ X; ?; K" k
6 d& E. ]. c0 p1 b5 A$ X; ?; K" k
 : q/ V0 R" a+ j- J) t' V6 ?
: q/ V0 R" a+ j- J) t' V6 ? . L$ s2 {3 {/ d: v* I, W! Y
. L$ s2 {3 {/ d: v* I, W! Y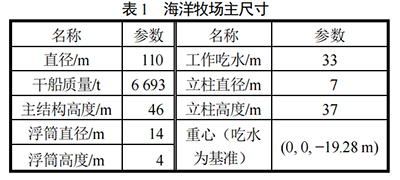 ' U7 `4 u- N/ k' B) L* u
' U7 `4 u- N/ k' B) L* u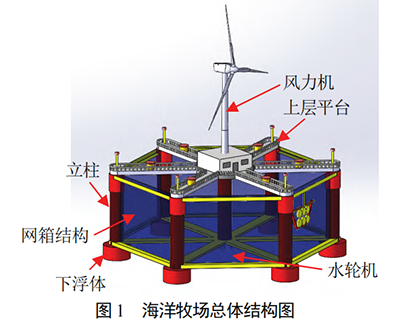
 ' j! `" u: X+ Q
' j! `" u: X+ Q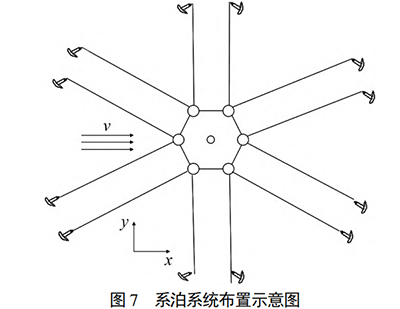 K4 }' J; O# U# ~, J- ?+ d A) o
K4 }' J; O# U# ~, J- ?+ d A) o
 # s' C( R* ^: Y$ v
# s' C( R* ^: Y$ v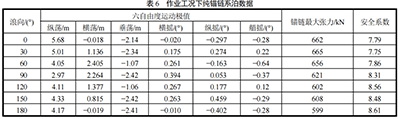 / @! ]+ c; a8 Q; m: J& @
/ @! ]+ c; a8 Q; m: J& @ 0 e* ?& `4 v0 ?. _
0 e* ?& `4 v0 ?. _
 & g0 M& z$ ^* S
& g0 M& z$ ^* S

 & Z5 L& I1 q2 g
& Z5 L& I1 q2 g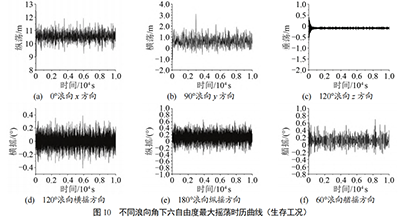
 3 Y. \ L# S5 s& X5 ]2 q
3 Y. \ L# S5 s& X5 ]2 q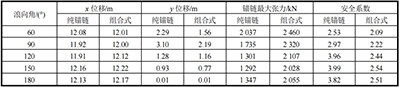 - \. T8 k) J/ O+ E2 B1 I6 o9 e) Z& B
- \. T8 k) J/ O+ E2 B1 I6 o9 e) Z& B