|
摘要 作者:李远芳,张 莉,陈钜龙 (南海预报中心,广东 广州 510300)
2 b7 u6 H, m/ g, G/ n4 K+ [ 摘要:传统海洋环境监测是通过人工采集海水样品,在实验室进行数据分析。海水样本在采集和运输过程中容易被污染,进而降低监测数据的精准性,为此设计了一种水下无人船构建海洋环境监测系统。硬件系统通过选择高频率、高分辨率的传感器左右分割数据,进而设置监测电源的电路接口来完成构建。设计基于 C 语言的下位机,以及 LabView 平台的上位机程序,完成系统软件程序构建,实现无人航行船水下监测。实验结果表明,水下无人船构建的海洋环境监测系统,在没有破坏原本海洋环境样本数据的基础上,提高了精准度。
; j( X5 S& m! e* B6 d+ l 关键词:水下无人船;海洋环境;监测系统;实验
6 S8 b% i8 i4 o9 @ j RECRUITMENT
' b9 V/ ~2 b( q3 | 水下无人船构建海洋环境监测系统研究
7 j2 F1 l% \' O/ } 0 引言 海洋环境复杂、多变,为了能够获取精确的海洋环境监测信号,需要对传感器中的数据进行高分辨率的采集[1]。因此,水下无人船的应用,不仅能够保证海洋环境信息数据的实时传输,还能够对大量数据进行存储,不易丢失。与传统单一海洋环境元素采集传感器相比较,水下无人船的传感器独立采集海洋环境监测点数据。基于水下无人船的海洋环境监测系统,通过微波通信、移动通信网,以及 wm 等多方面对海洋环境进行监测、传输[2]。构建基于水下无人船的海洋环境监测系统,其中包括:无线传感器网络、海洋环境数据管理系统,以及海洋环境数据传输通道 3 个重要子系统。
; \7 R' G; J: v- j1 v 01 水下无人船海洋环境监测的硬件系统 01.1 选择传感器类型为了提高水下无人船的监测效率,并降低其运输能耗,需要左右分割多传感器、多节点的目标源序列,进而将一致码位进行合并、压缩等处理操作。通常情况下,以水下无人船 32 个传感器信号采样点为例,集成编码传输,得到的具体表达式为:
6 x# c% H8 ? U j/ d; _% ^ 
9 F" k* z& N* `. S& s
其中:Xn 为采样序列。通过水下无人船的传感器采集海洋环境数据过程中,连续的“0”位、“1”位出现频率极高[3]。此外,不同海洋环境的无线传感器,以及采样点之间大同小异,存在一定的关联性,因此选择二叉树差分分割编码的计算方法,进而减少海洋环境数据的冗余度。 1.2 设置电源电路接口
9 k4 Y. q3 r4 z: X4 q0 y 海洋环境中海水化学参数值的变化不是很明显,将水下无人船中的传感器当作直流信号。在传感器的信号输入端增加了由 R12 与 C24 组成的一级低通滤波器[4]。U1A 的输出电压与传感器输入电压相同,即:V01=Vs;而 U2A 对其传感器信号进行了滤波调理,并在 U2A 同相端处增加了一个固定电压 VREF。得到关于 V01 与U2A 输出电压 V0 的关系表达式:
3 G* y4 h5 ~- f2 o9 C: k 
1 {7 Z2 @) [/ d+ O4 c+ ]0 q 其中:VREF 的参数值是固定的;可以将 V01-VREF 看作VIN;可以将 V0-VREF 看作 VOUT。因为水下无人船构建的海洋环境监测系统传感器具有传递性,可以得到表达式: ' J" d( n" W7 G7 ] d( f
( Y% n% T# l2 z9 t& l. q$ |+ t, X" F8 K 进而能够推理出海洋环境监测系统中传感器实时监测响应频率表达式为:
) I2 j! p7 v4 g 
- A) z- j1 @; U2 R6 N i
其中:Avp 为中频放大倍数;f0 为终止频率。在水下无人船构建的海洋环境监测系统中,监测并采集数据的实时、长期,以及连续性工作会产生大量海洋环境数据。
. h/ ?4 P3 U: \3 g( n' B 02 水下无人船海洋环境监测的软件系统 02.1 设计 PC 机程序
, h4 u7 X% F" J# r: ] 水下无人船海洋环境监测软件系统,其中下位机软件基于 C 语言平台的编程,具有结构合理、运行稳定等特性。而上位机软件系统是基于 LabView 平台进行编写,能够实现对海洋环境数据采集数据的参数值进行配置。
3 I6 C i" T2 ]% `5 S 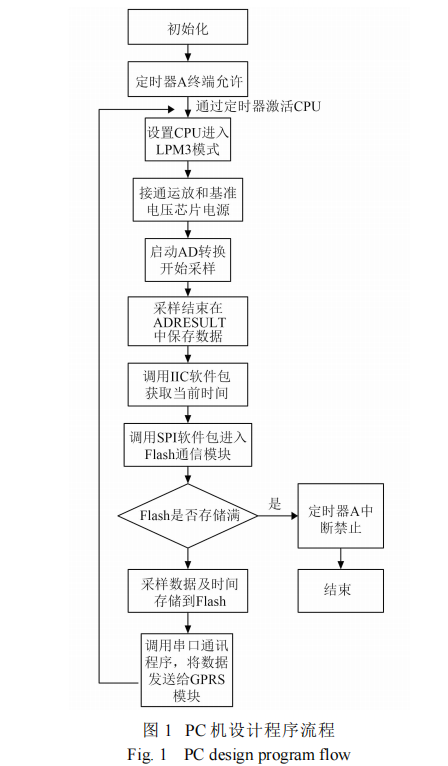
关于海洋环境监测软件系统中 PC 机程序的设计,选择定时器 A 的时钟源,并关闭其他定时器,实现PC 机程序的初始化。水下无人船的采样间隔时间是由定时器 A 决定的,定时器 A 甚至能够中断水下无人船的监测工作。
8 X5 z( j- L6 ? 2.2 实现无人船水下监测 由于水下无人船的视频信号与其他传感器的节点不同,因此通过 mpg-streamer 的程序对视频信号进行获取、处理并显示。水下无人船构建的海洋环境监测系统,其传感器输入层节点到隐藏层的变换是非线性的,可以得到输出层 S 公式为:
5 l4 Z6 j$ c& C* ^. Z 
e) o! a; f4 R# \" Q0 I7 o 其中:Kp 为海洋水水速水深数据比;β为通道增益;x 为海洋实时水速水深数据。
$ f3 B& W1 g+ y# a& S1 m7 E 然而,水下无人船的传感器会受到误差等条件影响,因此将输出层公式优化为:  其中,基于 RBF 的逼近算法及 S 与 x 的非线性关系,将 g(x)作为数据输入,进而减少水下无人船构建海洋环境监测系统的数据误差,提高精准度。; O5 d4 d4 W* T, a9 B& p. Z R 其中,基于 RBF 的逼近算法及 S 与 x 的非线性关系,将 g(x)作为数据输入,进而减少水下无人船构建海洋环境监测系统的数据误差,提高精准度。; O5 d4 d4 W* T, a9 B& p. Z R
03 仿真实验 03.1 实验环境 基于水下无人船的海洋环境监测的实验系统,集成开发环境为 MyEclipse2013。MyEclipse2013 作为全面的 JavaIDE,能够实现海洋环境监测系统的代码重构、监测系统,以及共享数据等服务。此外,水下无人船构建海洋环境监测系统,其前台页面是基于 HTML,JavaScript,以及 JQuery 等技术,而后台的开发语言是Java,并使用 Struts Spring Hibernate 的系统开发框架。
/ F$ b; K( G) V- r2 m' x 3.2 实验过程 在水下无人船构建的海洋环境监测系统中,包括Action,Service,以及 DAO 三层接口,需要连接 DTUGPRS 网络,并在水下无人船的监测系统上设置海洋环境的多种参数值。时间是作为海洋环境监测系统中不可或缺的测量参考数据,因此水下无人船的数据采集电路选择使用 PCF8563 时钟芯片。此外,水下无人船长期在水下进行实时监测,因此系统中的微处理器也要考虑其低功耗的特性。
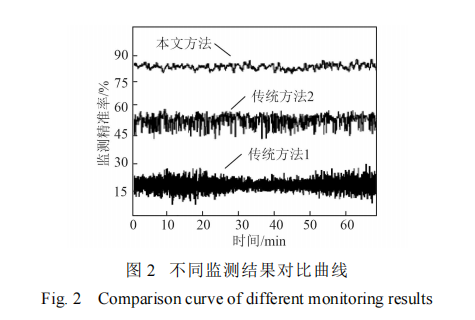
& f! i9 d5 o# b, Y' k3 P8 Q 3.3 实验结果 基于不同时段的数据作为海洋环境监测数据,通过控制 PC 主机的实验方式,将传统、人工的海洋环境监测与水下无人船构建海洋环境系统进行对比,并根据均方误差补偿的计算方式,对结果进行分析。根据图2的实验对比结果可知,传统的人工采集、监测海洋环境的方式,不仅费时、费力,还降低了海洋环境问题及时处理的精准性。而基于水下无人船的海洋环境监测系统,实现了数据的实时采集、传输,既没有破坏原本海洋样本容量,还提高了监测精准度。
5 H! V5 q( _6 O( J+ t: D. y 04 结语 0在海洋资源的开发与利用过程中,构建海洋环境监测系统就成为保护海洋环境的关键技术。基于水下无人航行舰船的海洋环境监测系统,通过海洋化学传感器的无线通信技术,实现对海洋环境数据进行实时、自动监测。
2 |. P# B9 P7 h6 W0 w$ N4 E7 T8 F 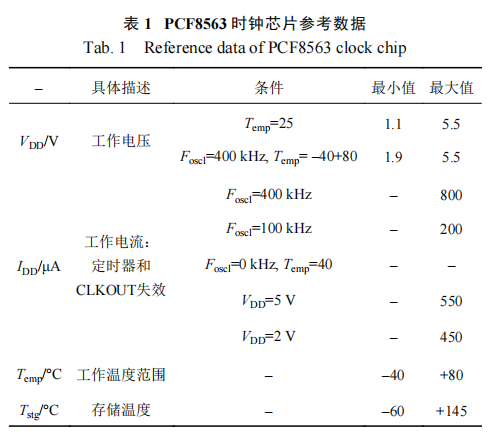
/ \6 g2 m! r2 N4 `! O F% V
【参考文献】[1]吴勇剑, 刘晓飞, 林森, 等. 基于无线传感器网络的海洋环境监测系统研究 [J]. 中国设备工程, 2021(2): 146–147.& W2 k7 t% Z" Z- u m( F1 W9 Y
[2]王文晋, 王冠学, 李奔, 等. 大尺度高速水下无人艇控制系统设计与试验验证 [J]. 中国舰船研究, 2020, 15(2): 95–103.
0 M- ?+ j! X0 i [3]芒戈, 朱雪田, 侯继江. 面向舰船编队的 5G 无人机基站群组网接入方案研究 [J]. 电子技术应用, 2020, 46(3): 19–22+27.
: y) Q7 T6 @( A7 f9 q [4]任宇飞, 吴玉泉, 李宇, 等. 水下无人航行器主动目标自动检测方法研究 [J]. 船舶力学, 2019, 23(2): 227–233.
5 A. H) G. M& y7 c, R9 B 
, T/ ~- F% b* s: Y
声明:本公众号相关内容均来自主流媒体及公众号,非商业用途,并不意味着赞同其观点或证实其内容的真实性。版权归原作者所有,如有发现侵犯您的权益,请后台联系编辑,我们会尽快删除相关侵权内容。
3 ]' U5 L& Y) h2 [9 t# o6 L
& i: \, Q g( a: i, s
' N8 u1 ]/ W* F( _4 q: J | 

