|
法国HYDROPTIC公司——UVP6-LP水下颗粒物和浮游动物图像原位采集系统
: M5 M! W" T2 C+ Y
+ q/ N; n8 N5 p设备介绍:/ ~5 a; T- ?& G
UVP6-LP水下颗粒物和浮游动物图像原位采集系统(CNRS专利)主要用于同时研究水下的大型颗粒物(>80μm)和浮游动物(>700μm),并在已知水体体积下对水中颗粒物和浮游动物进行量化。UVP系统使用传统的照明设备和经电脑处理的光学技术,来获得浮游动物原位数字图像,耐压深度6000m。: `) D/ {) r M7 W6 ^6 D
UVP6-LP是UVP5的小型、低价版本,它专为低速,空间有限及功率低的载体而设计,如剖面浮标,滑翔机,浮标,系泊设备,水下机器人等。UVP6-LP的设计质量标准与UVP5相同,并能提供高达500万像素的分辨率。 它能拍摄到红色闪光灯照射范围内对准焦距的浮游动物图像,对焦体积为0.65升。UVP6-LP与UVP5std版本和UVP5hd版本系统相互校准。5 O E( a; d: ], R4 Y9 d* d
2 Q7 k0 f' m1 q; p" A
UVP6-LP用于Argo浮标
! t( B' J0 F [1 l' O- O# w
' e. ]: F- ^" N" C# S- I( S" N9 h. r4 q# `, Y( L2 s+ ^; _) m
UVP6-LP野外校准 2 [2 u( W( J$ l3 G4 f7 r
UVP6-LP可以将每个大小和灰度级的实时颗粒物丰度传输到载体,并像UVP5一样记录下所选定的生物体及大聚合物的图片,以进行后续的离线分类。未来版本还将提供一个在线传输的嵌入式图片分类方法。8 T+ _/ V3 [( w J+ ~
警告:由于其1.3Hz的低采集频率及300μS闪光灯,UVP6-LP不能集成在CTD采水器上使用。
" [; {* A0 T) z& H' G8 k6 V$ B. P* y( w! x
' {0 H9 d5 L: R5 B0 T2 E3 f8 e
规格:1 n' H. p7 U2 T" |/ g) b1 p
耐压深度:0-6000 m* s' m* k7 A- r& j: M3 r
空气中重量:3.2 kg
6 V8 I8 m7 k+ n7 H水中重量:1.5 kg
. L4 |9 R, }+ c1 U% H材质:钛合金,玻璃,POM及铝(连接架)
* H' Y5 [ i* B" u' J/ q6 A$ @输入电压:8-28 Vdc (0.1W, 0.1Hz – 0.35W, 0.5Hz – 1W,1.3Hz)0 x! _3 @/ S9 M/ e
接口:RS232,以太网,模拟输出6 E1 }* \3 k7 E4 V$ P- t3 E
照明设备:635nm,500µS闪光灯4 h( y6 y' X8 n( s" l$ L. C' W
分辨率:5M pixels / 73*73 µM ' _" d7 k7 m4 A3 w+ x! J% {. ^" \5 \; t
视野范围:180 x 151 mm
?; F% c& Z3 [. l- E7 p8 |) V图片获取频率:≤1.3Hz
7 l4 c8 u+ L) x1 @% ?& @. Q图片实时处理$ c a. A1 \) o2 e* r V
存储:400Go# M( R9 h# \, n o+ h5 J) g# ^
可选:0.1% 精度的压力传感器
; b7 U4 _! s# i6 z0 Q与Ecotaxa网站(http://ecotaxa.obs-vlfr.fr/part/,www.ecotaxa.cn)兼容0 m. y; G% `% ~& K1 C9 {* d
- ]" n* M8 d! X' O
* Y6 h+ W1 {' \! R拍摄图片:
; e* x1 m) a7 U1 f# `0 s- ^' A' X2 _3 h+ k$ ^8 J5 Z) d
1 \4 B7 r% Y4 p0 ^+ E
, t' |5 v$ [1 \9 \6 v M, t
图像分析软件—EcoTaxa:
2 C- Q% k5 O5 O+ e0 d% F; d% w6 U' N
6 }7 \" s, e; S$ @* E" I; N7 g: g: o J- K9 f3 y
将UVP6-LP拍摄得到的图片进行处理后上传到EcoTaxa网站,可以利用网站上已有的库或自己已创建的库对图片进行自动鉴定、分类。同时,也可以根据筛选条件绘制相应的粒径谱等。此外,用户也可以在网站上对自己感兴趣的区域、项目进行搜索浏览。+ Z/ O- u4 b* L% T0 J1 {
$ I" t a$ k& P
" x. h- ` N7 C; B" b设备应用:2 @* Q, Y0 P( ]5 N( f/ K% O ?. e
1、在水下滑翔机上测试(Seaexplorer 、Seaglider)% r" P0 h; n- |5 d
- [% f8 W7 @3 i$ t' _) N' ^
' F( p1 J6 l6 {, b2019年3月,SeaExplorer搭载UVP6在法国尼斯附近海域进行的横断面测量。 1 }$ _+ d" Z& o8 W
5 o S8 O% A6 N6 y) D, T& W, N! J9 w2019年8月,SeaGlider搭载UVP6在塞浦路斯测试1 v0 _$ Y( v6 C5 C3 e1 A4 F
. G* \7 g/ [6 x
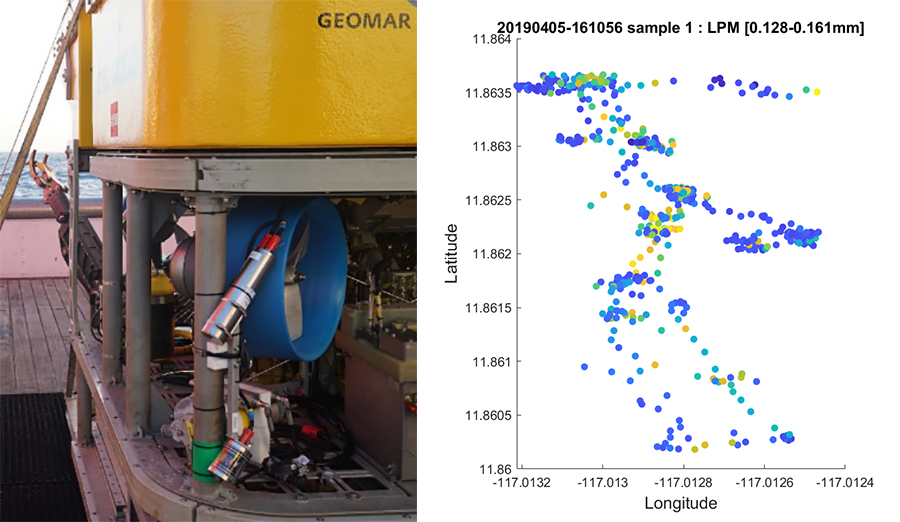
2、在Kiel6000 ROV(GEOMAR)上进行测试
" `& P7 \; e2 A' U6 }3 u: D4 A) @- r/ n3 X1 \, M! j
2019年5月的DeepSeaMining实验中,UVP6在赤道太平洋的4200米水深处下潜13次,以观察从开采实验中释放出来的粒子流。
3 k. p, _) F$ Z. ?& d* P' S( }/ t+ N
更多关键词:水下颗粒物和浮游动物图像原位采集系统,水下观测系统,浮游动物和颗粒物剖面观测,浮游动物图像颗粒物图像原位采集处理,水环境影像观测
$ m/ W3 J, m' U- a
% V0 \* J7 w+ P1 [/ o7 C! N& s7 l
1 o. N- n/ `$ W& V3 e7 i3 S( W) {- J4 }, y1 D% r- r% d
<strong> | 


 / I8 A* N2 L# @! b' n7 M
/ I8 A* N2 L# @! b' n7 M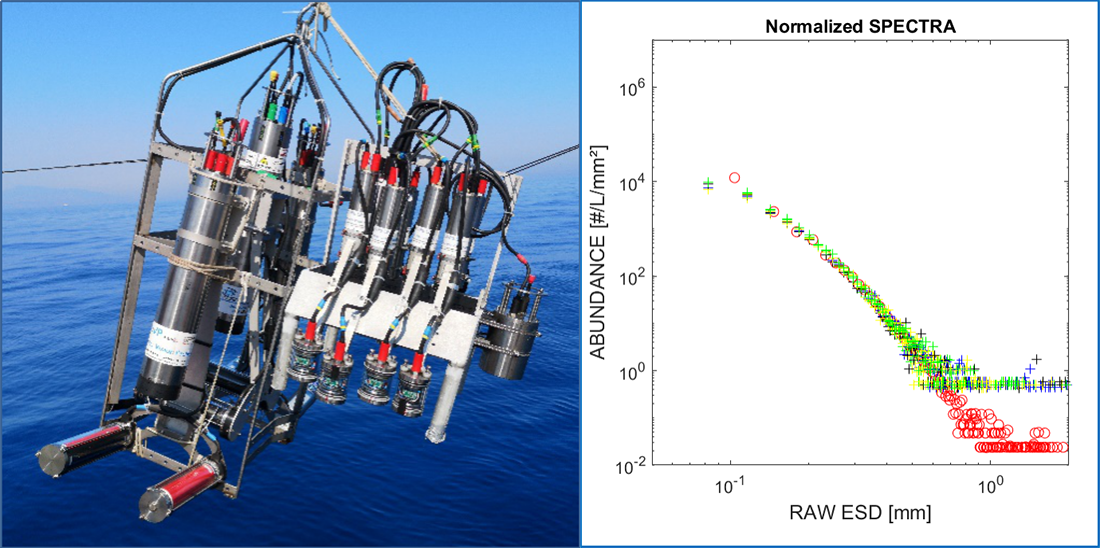
 - F" v5 ~% z2 g5 y9 {9 @' Q
- F" v5 ~% z2 g5 y9 {9 @' Q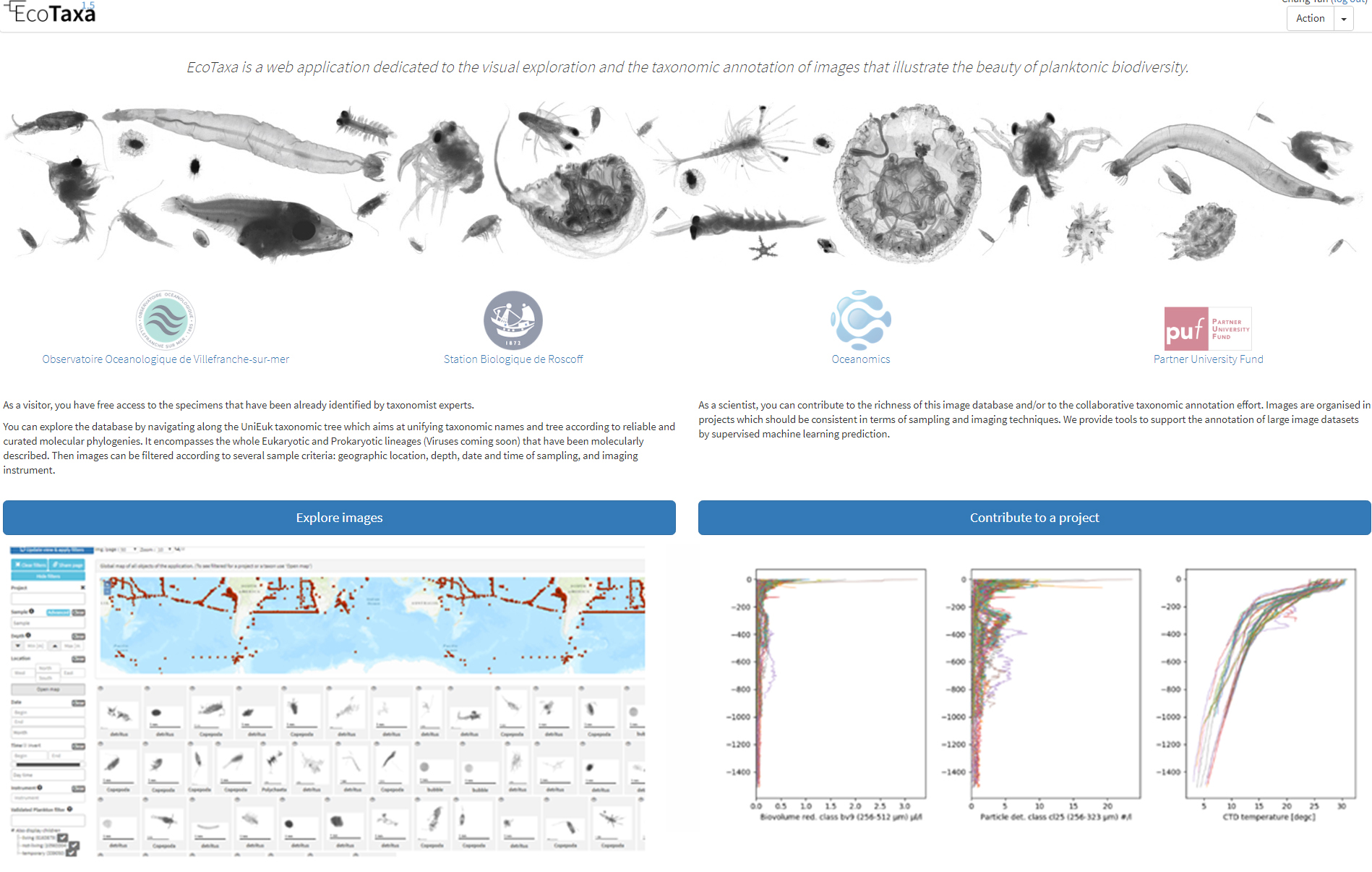
 7 x; @" N7 V" w7 ^( r% J
7 x; @" N7 V" w7 ^( r% J
 / r7 b9 o" }% M9 u3 d1 ]+ [
/ r7 b9 o" }% M9 u3 d1 ]+ [