|
* v+ r( }1 D0 u+ Z! z 智慧航道建设——流速测量与传感器
$ P% p9 [9 r! X0 O7 X) u 点击蓝字关注我们
/ H. c& y- w# c7 U) K9 E4 a 原 ! u6 q6 T- M. |, ^, h
原 , |8 N% o5 R1 Z0 E7 o
本
& i% o( ]2 Q) p) D" Z q 本 , J& K" e; X& x, H* d7 M
学 & g7 j, d& s: ~0 [# w% D
航 ( X0 X% H! ~ R3 g# L u& h+ P
道 - \1 l+ b' c: U2 h
前言 4 Z' x& L5 \8 z% z8 f K
表面流速流向测量是航道水文观测中的一项重要内容,对航道整治设计和航标布设等来说不可或缺。尤其是山区滩险航道,为保证通航安全,在不同流量情况下,要根据水位、流速流向情况及时调整航标位置。 9 T) u2 {, @, c6 Q' C4 [4 q
水流流速流向对船舶安全航行影响甚大,尤其是在河流交汇处。例如,京杭运河邵伯湖区段航道自邵伯船闸下游引航道出口至瓦窑铺,全长10.5公里,淮河入江水道穿湖而过,在梁家港处与运河航道汇合,后一路下行,分成六条河道流入长江,水情异常复杂。每年汛期都在航道内产生很大的横向流速,历史上发生过多起沉船死人等重大恶性事故,是苏北运河中对船舶航行影响较大的航段,被称为“老虎口”“鬼见愁”航道。 2 w, R! T# G" p& p& A! z& [4 p
一、流速测量概述
4 _& d' M7 r% G1 J5 x9 J 传统的流速测量方法是浮标法,每隔一定时间向河流中扔下一个浮标,记录下浮标在各个时间的位置,测量出各个位置距离浮标抛下地点的距离,最后在经过计算,得到水流的速度,测量耗时费事,且测量精度不高,人为因素影响太大。 " z' W8 i+ w9 X% G- O3 |
现代流速测量方法包括非接触测验和接触式测验。非接触式测验方法主要有图像法、多普勒频移法等。图像法是通过视频监控技术来改善传统浮标法的一种新兴测量手段,目前还处于探索阶段;多普勒频移法是利用多普勒效应根据接收水面波纹或者漂浮物反射波频移量来计算流速,主要有超声波流速仪和雷达波流速仪。非接触式测量方法快速、便捷,使用的测流仪器成本较高,维护困难。接触式测验仪器主要是转子流速仪,它有旋桨和旋杯两种形式,其流速测量范围宽、防水防沙性能好、成本低、维护方便,是目前我国使用最广泛的流速测验仪器。 + l5 ^" P8 n6 Q+ v: J9 S
二、转子流速仪
N% e. e: A" O: m9 N% v' | 
2 m! z& m' s% I( q8 g+ ?
旋桨式 0 w5 W- u$ E2 C+ h' m- l

/ u( t1 R0 t: ~4 H/ X 旋杯式
: D1 ]- o' s, b4 ]5 \ 转子流速仪主要分为旋桨式和旋杯式两类,它们测量流速的基本原理一样:把流速仪放入水中,水流推动转子旋转,根据转子的旋转速度可求出水流速度。旋杯流速仪主要用于测验中低流速,旋桨流速仪主要用于测验中高流速,但二者基本结构与信号产生原理无本质区别。
+ q; F, v$ ? ?1 b 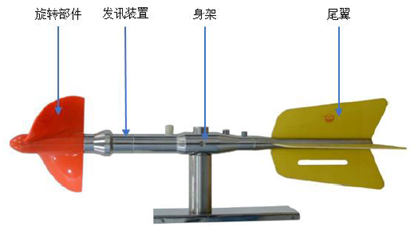
V+ Q4 c" {; V5 x, W 转子流速仪的结构
' X8 T, I: e+ j 流速仪法作为一种传统的流速流量测验方法,已经有非常悠久的历史,很多成果资料表格、成果资料需求都是在流速仪的测量体系中建立起来的。转子流速仪主要由旋转部件、发讯装置、身架和尾翼等四部分构成,如图所示。旋转部件中最主要的是水流感应部件——旋叶,它决定仪器的起转速度、临界速度、仪器检定常数以及动力响应等。 , ?- ? f4 Q3 ]5 _4 @# r* g+ T
三、声学多普勒流速剖面仪(ADCP) ( D n( m8 [4 s+ V2 S; x
1. ADCP工作原理 9 g; W# O3 \+ i. D
声学多普勒流速剖面仪(ADCP)对流速的测验实质是利用多普勒效应原理对水中颗粒运动速度进行测量,进而将颗粒的速度近似当做水流的速度。
6 d, G, X/ x& W% |. y7 d 水流速度测量的整个过程可以描述为以下几步:
) [- K( W& B \) E9 m, Y/ U) d (1)ADCP的传感器向水中发射固定频率的声波短脉冲。
' u+ M* M6 T* Z, M) V. d (2)声波短脉冲碰到水中的散射体(浮游生物、泥沙等)发生背散射。
) B5 X7 }6 S- u5 a2 v (3)ADCP接收回波信号并处理得到流速。 6 r0 I/ V; V+ V
(4)向一个方向发射的声波脉冲可以测出一维的流速,三个互成角度方向的声波脉冲则可以测出三维的流速。 ' s9 M" w/ C2 D, |4 V2 q" K
(5)通过坐标系转换将流速向量转换到所求坐标系。
1 E; ^6 N% H5 v8 m2 r9 E 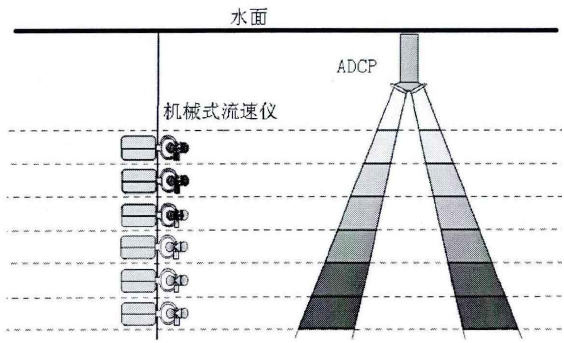
3 A, B+ _3 e' L 机械式流速仪与ADCP对比图
4 o: ~& p1 {; \6 H" W B! c$ O! C3 d- N 与机械式流速仪相比,ADCP测量相当于在该测量垂线上放置了许多台单点流速仪同时进行测量。在使用ADCP进行流速测验的时,单个流速值的取样时间很短,一般一两秒的时间就测出某垂线的一组流速数据。
+ r" S* f- s4 z 2. 走航式ADCP 6 x3 o( k8 D, |+ v
走航式ADCP是最常用的一种ADCP,它可以直接测量一条测线上的三维流速,通过移动它来测量面上的流速分布和计算流量。一般可以把它安装在船上,在船移动的时候它就能测量出船走过的路线垂向断面上的流速分布,从而计算出所走过的断面的流量。走航式ADCP进行断面流量测验时,测船是在断面上持续行驶的,虽然各流速值的测量时间很短,但是由于测得的测线很密数据很多,在计算整个断面流量时误差得到了控制。
5 ?. e( M- a( F; j# G5 R& N+ l 3. 定点式ADCP
- X: G/ j3 V, u. U 定点式ADCP工作原理与走航式ADCP工作原理类似,只是定点式ADCP在固定不动的位置进行测验,工作原理相对走航式更简单,没有复杂的坐标转换系统。定点式声学多普勒流速剖面仪一般又分为两种,水平式ADCP和垂向式ADCP。
! ]9 E3 u7 L1 C8 y9 n0 B. H: I 四、电磁式流速仪
3 c, x! ^& [+ q5 P; |6 I* L$ @: a 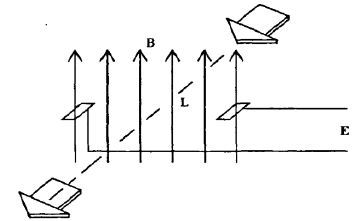
. {$ J! O; _! k6 l
电磁式流速仪是利用水流在磁场中作切割磁感线运动时产生正比于切割速度的感应电动势的原理来测量水流速度的。相比于转子流速仪,电磁式流速仪测量精度较高,测量时不受水面漂浮物的影响,但是一般需要布设水下电缆,通常多用于江河的岸边及小流速的浅水河流。 ' ^" T! H3 `/ v: d/ O
五、雷达波流速仪 # x* _3 K/ z" l. D0 X8 R( L
雷达波流速仪(即电波流速仪)在国内已经得到了较广泛的应用,主要包括无线遥控雷达波数字化测流系统、在线遥控多探头雷达波测流系统、缆道雷达波测流设备和手持电(雷达)波流速仪等产品。雷达波流速仪具有可远距离、非接触测量流速、测量精度高、水面漂浮物和水面波浪等对其流速测量的影响较小等特点。可以在桥上或岸边用三脚架固定测量、桥下固定安装测量及缆道流量测量方式等。 * c6 X; N3 y' p
1. 雷达波流速仪工作原理 , O d: L3 m( S" ?8 L0 ` o
0 h `6 b' T0 X2 M2 X" H) t
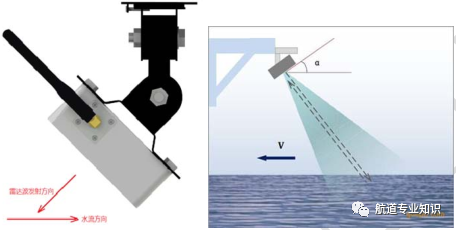
雷达波流速仪是利用微波多普勒效应,使用时仪器不接触水体,依靠向水面发射微波和接收回波来远距离测量水面流速。测量时流速仪安装在桥梁或缆道上,不接触水体,具有不扰动流场、测验历时短、测验频次高、抗泥沙影响等特点,特别适用于高洪测流。此外,该系统安装结构简单,维护方便,运行可靠、稳定。 , Q' a) |6 X4 v) f$ @
2. 无线遥控雷达波数字化测流系统 ) Q& Z6 z. O2 b6 Y* W- J, N) x& z
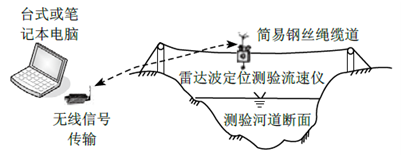
8 x9 B' `* H1 Z f! c$ C/ { A 无线遥控雷达波数字化测流系统,俗称水文缆道测流机器人,是把雷达波定位测验流速仪悬挂在配套直径4.2mm的简易钢丝绳缆道上,利用无线遥控、配套定位和测流软件,通过在电脑上远程操作,以非接触方式测验和计算水面流速、断面流量。 ; N# e. Q' }! R% ]
3. 在线遥控多探头雷达波数字化测流系统 ' t, e. R( J4 ~5 \( h& c! @! G
在线遥控多探头雷达波数字化测流系统适用于无人值守水文站,是把多个雷达波测速传感器探头用电缆连接,布设在测验河道断面不同的起点距位置,由PLC、集成线路板及太阳能电池组成的数据信号处理器,通过无线传输,测验河道断面多条垂线水面流速。通过雷达或气泡式水位计同步采集水位数据,或由其它方式获得水位数据,通过水位——实测大断面成果定时计算断面流量。可在现场显示或通过GPRS无线网络传输到水文监控中心,监测、记录、传输和存储河道流量。不足之处是测验环境要求较高,要求河床断面比较稳定。 8 ~+ v' w: D$ m+ w: h2 D, V; f, i
4. 手持电(雷达)波流速仪
4 O O' T4 T* s% @ M0 N# y& r 
+ F! X8 y: R+ @
目前手持电(雷达)波流速仪种类较多,名称也较多,如电波流速仪、手持雷达枪、微波流速仪等,是专用于测量水面流速的仪器。比较先进的是具有流速平均、回波强度、角度改正、自动生成降雨模式、输入和计时秒表等功能的电波流速仪,适用于桥测、有吊箱的缆道和断面比较窄的河道测量。 5 B% \# A$ m5 Q' l- G4 N9 T1 l% r- ~
手持雷达流速仪(SVR)具有体积小、携带方便、测速需时短、不需要接触被测物体等特点,因多数产品外形类似手枪,也称雷达测速枪。使用雷达测速枪枪测量水面流速,开始时将雷达枪指向水面,然后拉握扳机(或扳机后放松来锁闭),可测量水流的表面流速,第一个测量数据在10秒中显示,随后的测量每5秒显示一次(共8次),软件把这些测量的数据平均,并给出最后结果。测量时间总共45秒。
" r$ [- J, P$ z" f 六、流速传感器的选择 " @8 u' `+ G' S+ y- K8 \
机械式流速计利用专门的机械结构,将水体的流动转换为机械转动,通过测量转速就可间接计算河流流速。测量时需要将流速计放入某点垂线上不同水深处测量相应流速,根据公式计算获得该垂线上的平均流速。测量中需要保证流速计的垂直度,操作复杂,危险性大,且易受到水中漂浮物和水槽的影响。 4 S- y6 ~5 w k) ^
电磁式流速仪在测量流速时安装测量设备必须安装在水下,需要在水下布设电缆,一般用于近岸流速测量。 * R9 [( ]; D+ T3 ]5 n! ^1 B( l
ADCP利用超声波的多普勒效应测量水体流速,测量时只需将探头进入水面下10厘米即可自动测量其垂线方向上多点的流速,进而可计算获得该测点垂向平均流速。但是ADCP存在测量盲区,同时在水体浑独时测量误差增大,相对成本较高。走航式ADCP测流仍需人工现场操作,无法实现水文站在无人值守情况下进行流量自动监测。水平式ADCP和垂向式ADCP存在安装受限等客观原因,只能在局部地区应用,无法在全系统推广使用。 , K; O" i! e4 |7 J( |* W3 `% h
雷达波流速计利用雷达波的多普勒效应可测量水流的表面流速,通过计算公式即可获得测点处平均流速。在测量时,流速计与水体不接触,固定在测点处即可自动测量,测量精度高,范围大,适应性强,不受温度、漂浮物等的影响,可以全天候的工作。但是,在雷达波的覆盖区域里大型障碍物和金属物质会对测量结果有较大影响,测量时需要保证覆盖区避开桥梁支撑结构或钢铁结构物。
5 S+ z7 Q7 a ]* Z. G! ^& S" N! N 
* T' k2 ^% ?8 c: B4 \) R0 b 雷达波流速仪联网方案
; b' a: ]- K6 S+ F; E% l* v 根据航道通航实际情况,航道表面流速的测量应具有不影响船舶航行,不影响行洪,长期稳定性好,易实现无人值守,易于布设,易于遥测遥控等特点,并据此进行传感器选型。
/ R0 ?* _5 [2 I; q: M 目前来看雷达波流速仪(电波流速仪)最为适合智慧航道建设使用,原因有二,一是雷达波流速仪可以直接固定在桥上(下)或其它稳固的地方,对于观测流速极为方便;系统功耗低,一般太阳能供电即可满足测流需要;既有数字接口又具有模拟接口,方便接入遥测遥控系统;可通过GPRS等无线通讯方式远程接入远程控制中心。二是雷达测速枪操作简单方便快捷,非常适合日常航道维护随时随地测量航道表面流速的需要。 ——本文摘自于《航道专业知识(稿)》一书。
) n% g. _" A; e6 ^( u 注:《航道专业知识(稿)》一书可用作航道系统新进人员入职培训、转业干部培训、在职人员知识更新和考试培训等,现公开征集合著者,接受资助出版、版权转让及版权合作等事宜;有意者请联系作者微信号deng677119。 欢迎投稿!欢迎投稿!欢迎指正和交流!
: C! m/ w& k) j, G6 _& ^
/ K3 ?9 z/ r5 [! S
8 b$ S' @ n8 _; _$ x7 p$ z. T1 p) o+ H; w9 [# `* m- Z# t- Q0 I
2 }. Z: Q' ~" S | 

