 点击上方“溪流之海洋人生”即可订阅哦 点击上方“溪流之海洋人生”即可订阅哦一、引言
7 L* n: s+ _$ K# O' _3 @ 海岸带作为连接陆地和海洋的特殊地带,与人类生产生活息息相关,海岸带区域测量一直是海洋测绘领域的重要工作内容。水陆一体化测量因对水陆区域进行一体化无缝测量,通过统一测量坐标,避免了由于水上、水下分开测量造成的地形拼接问题,且工作效率和测量精度能够达到相应规范的要求,成为近年来的一项新技术,也成为海岸带一体化测量的利器。目前,国内外已对水陆一体化测量进行了一定的研究和报道。陈清泉对水陆一体化综合测量技术进行概述,实验显示水上测量精度水平误差均方根为0.16m,垂直误差均方根为0.13m,水下测量精度标准差为0.23m。边志刚利用集成船载水上水下一体化综合测量系统实施岛礁测量,实验显示水上点云平面精度达到1/1000m,水深精度优于0.1m,符合相关测量规范要求。卢秀山开发的船载多传感器水上水下综合测量系统采用一体化检校方法,保障了系统精度。目前的水陆一体化研究主要集中在船载水陆一体化测量系统,在智能化方面仍然有待提高。 9 y/ N; r% ?* a6 C/ x! R7 Y* a
随着无人艇、无人机等先进测绘平台的逐步深入应用,无人艇作为水陆一体化系统的运动载体将是水陆一体化海洋测量的一个研究开发方向。无人艇与水陆一体化测量技术的结合无疑给水陆一体化测绘带来全新的作业模式,在提高测量作业效率、降低作业人员危险程度有着积极的作用。然而,这也面临了一些技术问题:无人艇载体因为尺寸小,多波束测量设备容易受到船体引起的噪声、气泡等影响;水陆一体化系统采用了无控点测绘技术,为多传感器集成系统,并且定位设备、姿态设备为无人艇导航和水陆一体化测量系统的共用设备,各传感器系统性能如何匹配才能保证系统精度。
3 |' k0 w+ X# O( ^ 本文采用数值仿真手段对无人艇艇型、设备布局优化进行研究,同时开展多传感器集成、时间同步、“盲区”无缝以及多源数据实时显示技术研究,并进行系统集成和试验验证。
* s, Y3 I) I2 S, H9 }2 H 二、系统介绍 + o) E$ X4 g2 J1 b' H1 A0 h6 V) V
无人艇载水陆一体化系统采用了先进的无控点测量和智能无人艇技术,是船载水陆一体化系统和无人艇的兼容性集成。为了保证航向和姿态的统一,无人艇和测量设备共用定位和姿态等辅助设备。无人艇载水陆一体化测量系统包括无人艇平台和岸端控制台,系统组成见图1。  / q. B2 z+ B" a! A% [8 Z1 [* K6 ]
/ q. B2 z+ B" a! A% [8 Z1 [* K6 ] 图1 系统组成示意图
/ ^# e, K: U; B D 系统作业时可分为两个主要操作:无人艇测线自动导航和水上激光、水下多波束点云实时采集。无人艇测线自动导航的基本原理是在定位定向系统引导下,无人艇高精度跟踪事先规划好的测线。水上激光、水下多波束点云实时采集的整个测量过程涉及无人艇坐标系、激光扫描设备坐标系、多波束测深仪坐标系、定位定向分系统坐标系、惯性导航分系统坐标系、大地坐标系等6个坐标系。 ! a4 L# K" c- ?# V. U
水上、水下目标的测量原理:利用测量设备(多波束设备或激光扫描仪)获得测量目标相对于测量设备坐标系的坐标值,再利用定位定向分系统和惯性导航分系统获得测量设备相对于WGS84 坐标系下的坐标值,经过坐标变换后获得测量目标在 WGS84 坐标系的位置坐标和激光扫描设备和多波束测深仪的方位和姿态角度,实现对测量目标的位置测量。作为无人艇自动控制以及测量采集过程中发挥重要作用的定位定向分系统和惯性导航分系统,其精度、稳定性是系统集成的一大关键技术问题,在系统集成中,必须解决惯性导航分系统漂移以及定位定向分系统动态测量中的周跳和信号失锁的问题。 & D. b/ C2 P2 l* n' p
三、集成优化技术研究
1 g2 y/ K$ a! ]! N9 n ⒈设备布局及集成
, I" Y7 [' u u( \4 q$ R 多波束作为测量船上获取海洋及海底数据的主要手段,其探测精度容易受到水下辐射噪声、船底气泡等因素的影响。设备在作业过程中,换能器常会受船航行产生气泡的影响,通过对气泡群声衰减及反向散射特性的仿真得知,气泡对声衰减及散射影响大,导致测量换能器无法工作。
/ c# l" |- B O2 {' f! \1 c7 t 按照传统作业方式选用单体船加装多波束设备,船体存在开孔、多波束突出船体等问题,通过仿真分析发现这样的艇型很难避免产生气泡,见图2(a),表面气泡沿船底流经传感器附近,在传感器附近存在大量水汽混合物,防气泡性能弱。
# t/ L. f9 w, L1 o# f; A 双体船更适合于海洋调查,因此选用双体船作为无人艇载体,并进行设备布局优化。通过对设备布局后的艇体和多波束设备进行水动力学分析,见图2(b)。从流线分布和走向分析发现,水气混合流能够流过多波束换能器,而不至于在多波束换能器前下泻经过,因此,多波束换能器有效地避免了气泡的干扰。  , F, P$ u2 I+ l1 t" B , F, P$ u2 I+ l1 t" B
图2 声学设备布置模拟仿真 ; n" D# ^$ ?) w. g* L
为了扩大在近海的使用范围,设计时有意地增加了船体高度,这也进一步增加了多波束设备的吃水深度,更有利于为设备创造良好的声学环境。 2 p5 q# W3 K% g3 h0 L8 w, i* c
水陆一体化测量系统包括多波束测深仪、三维激光扫描设备、定位定向分系统和惯性导航分系统等众多传感器,可实现水岸地形快速移动测量,但是多传感器集成使得整个测量系统的数据采集和处理过程的难度增大,主要体现在传感器之间的采集频率不同、采集时间未同步和空间未配准等问题,导致可能因为某一传感器的性能不高造成整个测量系统的精度下降。水陆一体化测量系统的系统误差是个累积并传递的过程,不同设备的自身误差对系统误差的贡献程度也不一样,因此需要建立系统误差方程,计算不同类型设备对系统误差的影响程度,指导各仪器设备的精度选型。
# \* z4 F. {6 W- D Q 另一方面,无人艇和水陆一体化测量分系统共用定位定向分系统和惯性导航分系统,它们对共用设备的技术要求也因为功能不同而对其要求的性能是不同的,如何选择合适的设备性能也是需要重点考虑的问题。因为测绘要求高于导航要求,因此以测量要求对定位定向分系统以及惯性导航分系统进行设备选型。主要仪器的性能参数见表1。
2 k9 Z3 A: R( L. c0 F# L4 R 表1 主要仪器性能参数 8 E, ^2 C( }0 D( t$ v8 D, a8 Q
仪器名称
) h/ `* R# v7 p 主要参数 1 j# x/ q5 T5 H# i4 W! C! |$ A0 L
多波束测深仪 2 `- v" c, f$ y
可选频率:170~450kHz,精度:3mm(底检测),最大量程:400m,波束角:10°~160° - ~7 Q6 V$ g3 i8 |
激光扫描设备
" t) \( G: c! }1 e 扫描距离:1200m,扫描精度:5mm(100m距离处),发射频率:30万点/秒,扫描视场范围100°×360°
/ T3 U) b& a |$ l 惯性导航分系统 2 I* @, U. V8 o
航向精度:0.1°(与纬度线正交),分辨率0.01°;升沉精度:5cm或5%; / I7 \1 V# V7 `3 u `! u
横滚、俯仰动态精度0.01°,分辨率0.001° G7 g1 _! B% M
定位定向分系统 x; Q; _9 m- R; R" ?( a
精度:±2.5cm,RTK基准站差分,1PPS,NMEA0183输出 2 x3 Y# I* M; P) a& y/ \3 w1 e
经过集成,激光扫描设备、惯性导航设备以及多波束测深仪位置关系见图3(a),一体化测量分系统与主控终端的信息流关系见图3(b)。激光扫描设备、惯性导航设备和多波束测深仪自上而下安装至艇的中轴线上,以减小惯性导航分系统对两个测量设备的影响。数据采集软件获得时间和PPS信息,对多元数据贯以时间标,可实现时间同步。  Y& r3 C$ x9 F! A4 B' K+ j" s5 O* o Y& r3 C$ x9 F! A4 B' K+ j" s5 O* o
(a)一体化测量系统结构简图  ; d9 m, P0 [5 a* |
; d9 m, P0 [5 a* | (b)测量分系统与主控终端信息流关系 9 e5 r# K$ V+ J) v
图3 水陆一体化设备集成示意图
- w" d& r Q% \% ]$ {7 _# ]; ^% v ⒉时间同步技术
i* r! V; t) d9 V* s8 A$ m/ Q+ U 在水陆一体测量系统中,三维激光扫描仪用于测量水上地形信息,多波束测深仪用于测量水下地形信息,定位定向和惯性导航分系统用于为激光扫描设备和多波束测深仪提供定位信息、时间信息、姿态信息和航向信息,这些信息的需要统一的时间同步基准。
/ o- h! P* O* }& z8 y( b3 `5 r GPS的1PPS脉冲作为时标。在GPS接收机取得有效导航解的时候,从中提取并输出两种时间信号:频率为1Hz的脉冲信号1PPS和$GPGGA或$GPZDA语句给出的UTC绝对时间(年、月、日、时、分、秒),它是与1PPS 脉冲相对应的。根据接收到的1PPS脉冲与该时刻的数值时间,多波束处理和激光处理单元对时钟进行校正,实现多波束和激光处理单元时钟与GPS时钟的同步。
+ x/ t h% F! x& M0 y 利用GPS时间同步原理,设计时间同步控制器,为每个扫描事件贯上时间并接收贯以时间信息的测量数据。实际中,在每个PPS脉冲贯有时间标签的触发都进行一次转换,计算的转换误差仅在接下来的一秒内有效,下一秒会计算新的时间差值,因此不存在累积误差。
" z2 R& }" d3 B3 k" V ⒊“盲区”无缝技术
$ }1 }% w# p6 o# U- x 由于多波束开角一般都在160°以内,船载三维激光扫描设备无法穿透水介质进行测量,因此将多波束换能器采用正常方式安装会导致近水面的海底深度数据是无法获得的,水岸一体化测量结果中出现测量“盲区”。 % h# K z$ G# D7 H' K
为了有效减小“盲区”,设计转弯结构见图3(a),采用多波束倾斜旋转一定角度进行安装,使发射和接收尽可能面向水面结合地带,可以有效解决点云“盲区”问题。在多波束测深设备进行水陆连接处作业时,可以使用电子旋转功能,将能量集中面向水陆结合处发射,降低水面噪声的影响,获得更高质量的数据。 ; L6 N4 H! W, D J; T
⒋实时拼接显示技术
0 V J" @. W- } 测量数据的实时显示可以有效指导作业人员随时了解数据质量,在多源数据测量显得尤其得重要。为了对水上及水下的地形进行连续的测量以及进行三维场景的重建展示,数据采集与处理软件实时接收三维激光扫描设备、多波束测深仪、 定位定向分系统、惯性导航分系统等多源数据,实时进行点云归位解算与坐标转换,并将点云在三维空间中加以显示,即涉及到点云镶嵌拼接技术。 h) x# H; |& n$ b+ F3 K/ ?* {! [$ @
多源数据实时拼接主要涉及时间配准和空间融合两个关键步骤,前者基于时间同步技术,后者基于定位定向设备将多波束测深仪和三维激光扫描设备的点云融合在统一的坐标系下,实现水上和水下地形数据的坐标统一。采用 RTK技术确保了多波束测深仪和激光扫描设备能够同时准确地进行匹配拼接。
7 M) y; ?5 ~6 E8 Y5 v! s2 h 四、试验 . i! k; n' Q! d) g4 d6 c* k
为验证和说明本系统的可行性,利用该系统进行实际测试。试验地点为杭州钱塘江、烟台,成图结果如图4所示。 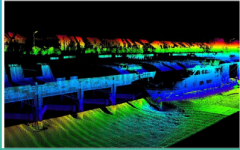  : s* Q7 e7 f$ Q
: s* Q7 e7 f$ Q (a)杭州 (b)烟台
4 H( ^' [" T2 [0 j 图4 数据成图示意图 7 [. D7 n7 A5 M* U0 o
由于激光数据也作为类似多波束数据进入数据采集系统,因此激光扫描设备的校准流程与多波束测深仪一致,仅在地形选择上稍微不同。校准流程:参考常规的多波束校准流程,寻找典型地形,布置相应的测线,获取用于校准的数据,利用CARIS软件校准获得多波束测深仪、激光扫描设备与惯导间的横摇、纵摇、艏摇角度参数。 7 Y' V) s1 ^: |8 P0 ~7 ]3 v9 f
取杭州钱塘江和烟台两地试验的水陆数据共34对,激光数据和多波束数据垂直方向的间隙统计表入表2,最大误差仅为0.06m。
; R- l" [: \. y. f5 l3 t6 { 表2 水陆地形测量数据
, y7 z. m9 I ^8 ?1 a, J% K 统计点数 ( l: \2 h/ l. B# W0 b9 P) |
(点) 9 E- ^1 `' D3 G* n% S& F8 {
垂直间隙 % y) G) q$ t! _* H
平均 : Z+ u' X5 z5 b8 l
最大
* B, H& M- o# w1 X, N7 m4 ] 最小 " i& v( N5 `8 s/ l
34
1 F; L1 t8 v6 Q6 w1 M5 |! s2 z 0.12
8 C% ~ h8 g: Q) r& O9 J( R 0.26 ) j7 S; c5 L+ j. c
0.03 6 b+ o- G* ^% n3 Q. s- j; @
在钱塘江试验中,取码头上4个标记点,通过对激光扫描仪测试数据与浙江CORS测量值的对比分析,激光扫描仪测量最大误差为0.18m;多波束测深设备测量均方差为0.03m,具有较高的内复合精度。 ! a, { K4 r& N: t$ \
根据对烟台和钱塘江水上水下一体化整体成果图4进行分析,水上和水下地形在结合处能够很好过渡,可以看出无人艇载水陆一体化测量技术在水陆区域的成功应用,其采集数据比较完整,实现了平面和垂直基准的统一,重点地物已经达到水上水下无缝拼接状态。 " k+ a2 F8 [! A/ U. Y' \8 _ y
五、结束语
% z3 c: o0 {, Q 无人艇载水陆一体化测量系统的出现及推广,是对传统测量方式和船载水陆一体化测量系统的有效补充和智能升级,在远离陆地岛礁、石油平台变形监测等人工难以施测的地方作用明显。本文研究表明:
/ A# W+ y2 s2 W( E* o ⑴仿真分析表明,本文艇型及设备布局不但适合于水陆一体化测量使用,也适合仅作多波束测量时使用。
% B) U3 c) L* Y* T) e ⑵在多传感器集成中,各传感器的测量误差对系统误差影响程度不同,定位定向分系统(含惯性设备)作为将仪器坐标系下的测量数据转换至地理坐标下主要设备,同时还需要作为无人艇自动导航使用,作用关键,在研究中需要重点考虑,性能在保证系统测量精度的同时还要与其它设备性能保持匹配、兼容。
7 A# {1 W; A) O8 o% y; _ ⑶时间同步用于水上、水下测量数据最后的空间配准,各传感器的同步精度、系统测量精度与时间同步系统有着密切关系,各传感器的同步精度受时间同步系统影响,两者间的设备性能、同步模式、通信方式的选择需要系统分析并用容许误差作为设计目标。
7 C; O) {* E0 d; T1 _: m) b+ G ⑷基于无人艇开发的水陆一体化测量系统提高了常规船载一体化测量系统的智能化水平,减轻了作业人员的劳动强度,降低了操作风险,有着很实用的价值,适合在海洋测绘上推广使用。
5 y. b- \% u4 B+ B, A 1
0 O/ U! X" t5 g END
* R; C2 P1 u4 `/ \7 F 1
5 u9 f9 u- h$ [1 s% F) h 【作者简介】文/洪在地 刘斌,均来自北京劳雷海洋技术有限公司海洋技术中心;第一作者洪在地,1977年出生,男,福建南安,高级工程师,博士,主要从事无人艇、智能测量系统研究;文章来自《海洋测绘》(2020年第6期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有。    ' [) i, D) a5 x% P0 q0 e
' [) i, D) a5 x% P0 q0 e 相关阅读推荐 海洋论坛▏测量无人艇研究进展综述海洋论坛▏声学水面无人艇在浅水海底地貌调查中的应用海洋科技▏无人水面艇收放技术发展趋势探讨海洋论坛▏无人艇载多波束组网测量系统海洋论坛▏无人水面艇在水上交通安全监管中的应用海洋技术▏蒲进菁等:无人船现状及发展趋势综述     , X* y1 V) r4 ]2 ^5 k8 j , X* y1 V) r4 ]2 ^5 k8 j
公众号 ' `- U4 [8 E$ B1 V1 \, M( P. T
溪流之海洋人生
- p- s9 s4 M T9 } 微信号▏xiliu92899  ; F6 M7 {( O# b+ c9 B: B1 u/ p. m
; F6 M7 {( O# b+ c9 B: B1 u/ p. m 用专业精神创造价值 ) [$ M- T9 T" v3 L, J& A4 K2 b
用人文关怀引发共鸣 您的关注就是我们前行的动力
# D9 Y$ l7 u3 Q# R5 _" D j; j 投稿邮箱▏12163440@qq.com   0 { D j; d( x, g, }4 Y1 z. [" G' N9 a
5 l9 u( q9 y, V- E
6 T: z& n0 o! Z' ?
& f) y9 W2 d }$ p% j" i5 [
0 { D j; d( x, g, }4 Y1 z. [" G' N9 a
5 l9 u( q9 y, V- E
6 T: z& n0 o! Z' ?
& f) y9 W2 d }$ p% j" i5 [ | 

