|
! X' |8 N, X1 k) I! Q; h
在国家海洋安全预防和应急处置中,水下场所的监测是各国关注的重点。当海洋出现突发情况时,研究人员应用海洋监测系统设施可以完成对水下状况的连续检查,或对水下潜在危险目标及周围水区的状况进行远程控制和监测。俄罗斯紧急情况部每年都会在俄罗斯联邦水域进行水下潜在危险目标的调查,并研发专门的技术设备来支持海洋调查,技术设备包括遥控无人潜航器、无人自主潜航器、水下滑翔机和波浪滑翔机,以及由此类设备构建的集群监控系统。
2 F* `4 P; d: B5 T2 p1 K* V 无人自主潜航器(UUV)被广泛用于监测和调查水下潜在危险目标(图1a),这样可使操作人员避免接触到水下潜在危险目标或者各种污染物。为充分发挥UUV的性能,装备UUV的科研船必须同时配备适当的信号发送装置以及专门的设备操作员。UUV应用的典型模式是勘测水区,收集水下各种潜在危险目标的传感器数据,并获得关于目标状况及位置的视频信息。在UUV需要承担少量接触任务时,如污染物采样、取样、对危险物品的净化,还必须为UUV配置一个多功能机械手。
1 ~; Z# D/ Z$ u8 D4 D; ^ Z0 E5 V 研究人员可以使用UUV采集水下潜在危险目标信息(图1b),通过UUV上的传感器收集相关数据,以完全自主的模式完成水域勘察任务,但该方法的缺点是能源效率低。长期自主式的水下滑翔机(图1c)和以此为基础的异质无人集群进行水下潜在危险目标探测被研究人员认为是更合理、更科学的方法。异质无人集群包括作为采集传感器和远程通信中继的波浪滑翔机以及检查类UUV。异质无人集群可以在自主模式下完成勘察水域数据的收集和处理,并及时将相关数据和处理结果传输给控制中心。
5 _. ^( Q2 d% j0 K 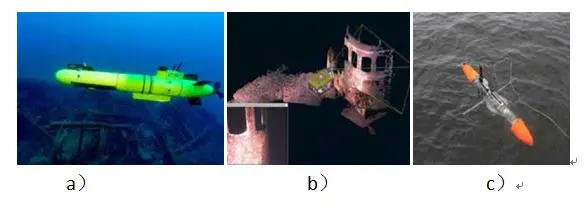
' p$ \, A7 d9 y
图1 水下潜在危险源监视系统 $ _: `1 b% S. ?# P, y/ A
综合考虑能源效率和UUV装置的特点,海底驻留监测方式更优。海底驻留式监测系统通过对现有设备和先进技术的协同应用来确保对水下潜在危险目标进行持续监测,并检测可能导致环境灾难的海洋污染。海底驻留式监测系统由混合无人设备和海底站构成,该系统可以自主连续收集数据,并可在单平台或集群设备上对数据进行处理,使用水下无线链路和有线传输网络实现分布式信息传输与处理。上述系统可以及时将数据和处理结果传送到对接站或者其他网关,操作员从而可以获得水域状况最新数据,当发现海洋污染突发情况时能够做出最佳决策以及预测污染的后续蔓延情况。
' X; ?4 B8 ` X0 C) \: \ 海底驻留式监测系统与海底对接站相连接,能根据任务类型提供充电、载荷更换、设备部署以及与岸上或船上控制中心的通信功能。海底驻留式监测系统的基础是无人驾驶设备和自主无人作战潜航器。无人潜航器采用功能模块化设计和智能化相关技术,具备了一定的自主性和扩展性,可以在极端海洋环境中长期运行,主要用于监测和维护海底油田安全运行。
# \) e2 y$ `2 Z7 K& n 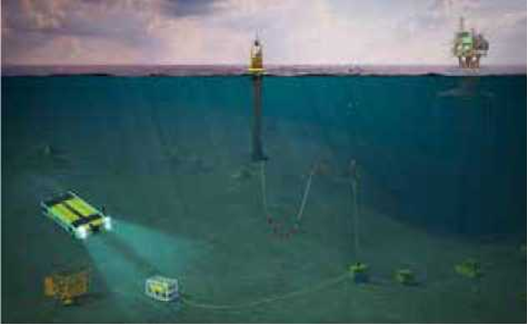
7 j: X4 Q) P+ `
图2海底驻留式监测系统
% i, O1 p/ K( j; O 现有的自主型UUV配备了五自由度的机械手系统,能够在石油、天然气和海洋资源开发中以自动、自主模式执行包括水下监测和勘测作业等相关任务。自主型UUV利用机械手系统可以对海底物体进行清理和维护作业,还可以进行土壤成分和其他取样作业。为了成功完成上述任务,自主型UUV具有水声导航设备、光学监控设备、无线水下光学通信设备(传输信息速度可达20mbp/s)、自主控制系统、机械手无障碍控制系统等设备。 , ]9 D* r3 r! |4 ~* j2 ~1 v

9 a8 ^( V/ I( ~; i6 P! T 图3 俄罗斯正在实施的UUV海底土壤采集项目 0 e/ j* ^, `4 A4 j1 e& ~' f
俄罗斯海洋研究所与圣彼得堡国立海洋技术大学提出了一种异构无人集群海底驻留式监测系统概念项目,期望发展集群之间的互联互通互操作和群体智能协同,形成包括水面机器人、水下滑翔机和UUV在内的驻留式无人集群,概念系统的构成如图4所示。
/ Z, q6 W, R# F* H+ V; h# J8 y 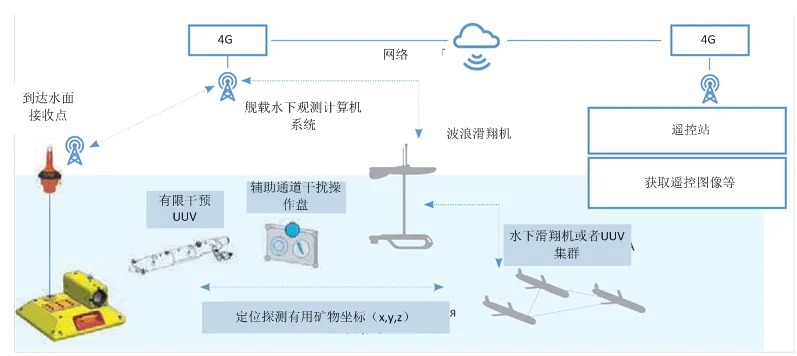
' ~1 ]* H7 [( t8 Q4 t" c4 C+ S
图4异构无人集群海底驻留式监测系统概念项目 7 ?: e1 _8 a* h4 E4 Y9 ?. R
俄罗斯紧急情况部圣彼得堡国家应急局、水下技术科研生产企业Oceanos股份公司和圣彼得堡国立海洋技术大学对该系统进行了联合海上试验验证。研究人员通过使用单平台和集群的滑翔机类无人自主潜航器,在基于无人潜航器运载平台和岸上的控制站之间构建了遥控检查设备系统,完成了对水下潜在危险探测区域的模拟搜索、调查和监测。
7 c1 y1 C4 S' C5 }5 y 转自智慧杰瑞 ' O* Q9 b3 O% [1 j2 p! d. o
END  联系我们 联系我们  地址:陕西省西安市锦业路96号电话:029-88327279 地址:陕西省西安市锦业路96号电话:029-88327279邮箱:bianjibu705@sohu.com - G- \* I! J6 h+ x4 c, F7 [7 ]
网址:sxwrxtxb.xml-journal.net
: X7 K! W8 S g" H8 A' G QQ:767358370 : Z/ n" F0 d# e+ A0 p
8 S' z7 K+ t% o1 e* ~
% O* ^* Z* K, l) I2 |- B5 f+ \$ V
- M) w* y; g) k- G4 D* y( [8 [$ P& J$ |
| 

