|
% k0 y, H4 |, b6 i! w 1.结构原理
; |! U0 \2 t& `- k: Z' I 索道智能流量监测平台是可以搭载目前市面上绝大多数流速、流量监测仪器设备,可以将雷达流速仪、转子式流速仪、超声波流速仪、电磁流速仪、ADCP作为传感器,以自走小车为载体,在控制单元的控制下,按照用户设定的测流断面垂线自动完成流量监测。按照小车搭载的流量监测仪器不同可以分成两套监测模式:
6 o1 O: v9 V( K& L. ?/ x: C 1.搭载非接触式流速仪的监测模式。(雷达波流速仪)
, c0 \3 r# y, d! R& i 该流量在线监测系统可以进行各条垂线流速测量、断面流量计算、数据分析、报表输出。该系统由雷达流速仪、水位计、雷达小车、系统控制单元、供电单元、运行缆道、平台软件等组成。 ' v. z: ~* C( A2 R) @; I/ [$ I. Q" a
2.搭载接触式流速仪监测模式(普通转子式流速仪、电磁流速仪、多普勒超声波流速仪、走航式ADCP) / K- i' \1 ~8 {% m
该接触流量在线监测系统与全自动缆道功能相似,自走式小车具有自动前进后退、自动升降、自动停车功能,可以搭载各类接触式流速监测仪器设备运行到不同的垂线,进行垂线多点流速测量、水深测量、断面流量计算、数据分析、报表输出。该系统由转子式流速仪(或电磁流速仪、多普勒超声波流速仪、走航式ADCP)、水位计、自走式小车(载有吊重100公斤的电动卷扬机)、系统控制单元、供电单元、运行缆道、平台软件等组成。 7 F) E4 Y, j1 E1 P8 P
2.系统功能 0 x& f* x) T% w' s! A; z3 l4 y
水位采集测量 ) f: v9 x1 s% u
测流车运行至测流点时,启动内置超声波水位计实现对水位的测量。 : Y& p* U) u; N7 n* p4 P1 H
水深/淤积测量
* w: u- k4 }0 g! F$ k# N# T 依据拉绳式原理或压力式测量水底到测流车高程或水深,进而计算水深或者泥位。 ( N" n: x1 C* N: C- L# K) P2 T
分层流速测量
' m3 a; n2 u, K7 q! }2 p 依据测点水深或者用户设置对分层流速进行测量(一点法、两点法、三点法等)。 , O& ^( g' O0 z$ k2 U
断面流量自动计算 3 j: } Z+ g( Q+ {: {7 x
测流车对所有测点流速、水位、水深测量完成后,依据公式计算断面流量,并显示在测流车接触屏。
; V* I" W9 [( O7 w; E 启闭卷帘门 " ]5 q7 G$ t- g! Q5 _
测流车在测量过程中,具备自动检测卷帘门状态并自动启闭功能,进出测流房无需人员干预。
* W: @( v# Q& z7 d 自动行走定位
* M1 ?7 Z' P3 p! S% e0 G7 ` 测流车在运行过程中,自动行走到测点进行测量,无需人工参与。 ; r/ w- W1 @/ i6 j1 U& C
自动充电
! | i# \/ r) y4 ~* P, r8 t2 f( I 测流车在测量过程中,监测到电量不足后自动停止测量状态,返回测流房自动充电。
+ O' t+ R) N" {! o& b `% T8 q0 ^ 本地控制
; s; r7 m/ I( O# @4 E: S 测流车允许用户通过小车触摸屏进行手动测量控制,测量过程数据实时显示在小车屏幕上。 $ v2 E- P% g# P$ h8 Q
远程控制 h8 I! f7 u% t$ |) i; V
测流车支持通过上位机软件远程控制操作,测流车通过无线网络实时将过程数据和状态信息发送到上位机软件,用户可远程监控测量过程。
1 _% S+ q, t3 h$ _ 故障分类报警
3 q, y( ~+ I7 @3 N 测流车在运行过程中,可对监测到的故障分级管理,不影响测量过程的故障以闪光形式提示用户,致命性故障则触发声光报警,并立即进入待机模式,防止发生意外。
, @# Y+ U# Z& j u y" D) W7 @ 手持终端显示控制(增配) 2 P" o- w% \$ E) O
可增配手持终端,手持终端采用电池供电,可与测流车无线连接,一键启动测流车,并可实时接收测流状态及测流数据。
5 ]6 f9 {* A3 ?5 I0 r6 f 3.技术参数 * A3 }. r6 v& C3 E8 o- t0 @
测流车体
, |3 b& N" D: n2 C 驱动方式:齿轮减速后驱 . D A8 Q' Z. `* @
外壳材质:镀锌板+模具塑料
* T& Y9 n2 R0 H! g: E1 C7 @: _ 脚轮材质:铸铁V型槽轮
9 t8 l1 f6 T0 x6 K+ ~' t* C 重量:50KG(不包含铅鱼重量)
, S) J! H) b1 E+ i+ B: P 测量指标
7 R3 x. {) h# {1 E6 g8 K$ O 水位测量精度:5mm@10m(超声波) 3 Y8 U' L# H, t$ M2 E
水深测量精度:5mm@5m(拉绳式)、3mm@5m(压力式)
, G3 }" { S! M, C9 z# H6 |' G 流速传感器A:旋桨流速仪(0.04~10m/s,1.5%FS) . h% ~8 ?- c6 t: b' Z5 Y6 A
流速传感器B:电磁流速仪(0.02`5m/s,1.0%FS) 5 d8 e" _$ m: p+ v' @
流速传感器C:雷达流速仪(0.15~20m/s,精度±0.01m/s;±1%FS)
: ~; T8 k& J0 l: E6 ]& Y- k, u 流量计算:优于3%
) F$ _2 ~8 L# L( @; p 操作指标
9 d3 l8 h3 b: E7 a9 S+ P7 i 控制方式:本地控制、远程控制、手持终端控制(选配) 3 I" h) z. [; `' K
前进速度:30cm/s 4 O9 h5 H: I5 y* h) O
升降速度:5cm/s
3 O! _. T1 P# H# _5 }1 z1 `5 w 动态响应延时:50m/s
9 H4 z) }1 x+ B 单点流速测量时间:30s 60s 90s 120s(可定制) ( e3 p1 O J. I1 |1 l+ ^
4.案例图片
: |- m& |1 C% O" a5 O. ]1 f 
; i0 [, q3 x& r 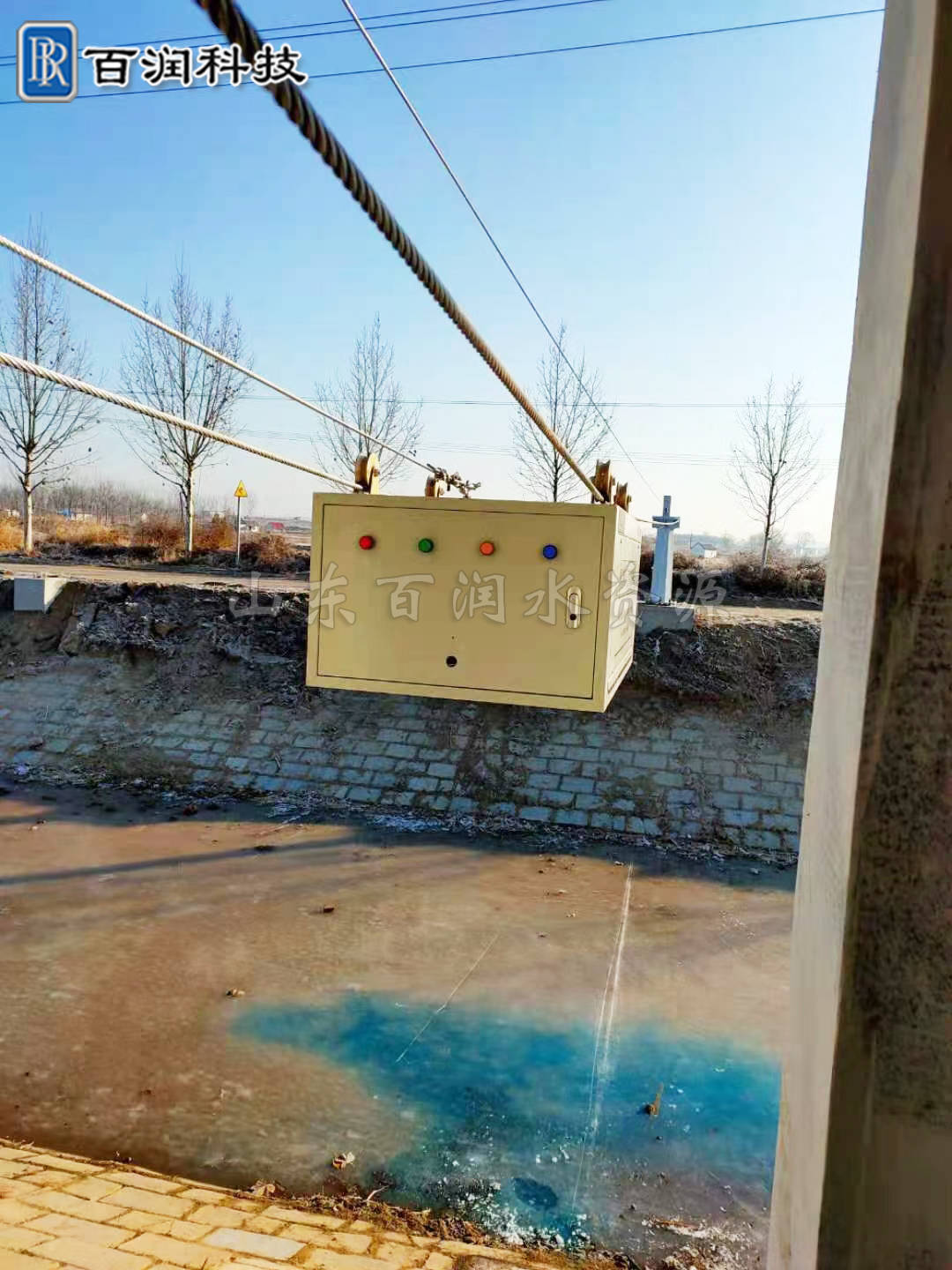
/ I ~8 z2 E1 B9 E: f

/ e, f- l* f' L& m* J 
/ b# m, a- Q% L# f 
* ` G$ ~/ g, H) }" g6 I2 _ 
$ s) j% R$ o* N! Z( o

9 v' f. v8 u% f! X* n6 Y 返回搜狐,查看更多
, @7 E( g: W% y& X# T3 k
2 |! h' N' Y3 ]/ C% A 责任编辑: 8 n+ \* u6 j t+ I# n( O9 W6 }
: b% D0 [" a9 B/ l
7 Q5 f9 c# t- r: K( c; D9 u+ A- r
+ j N" Z. p9 v6 q z5 R7 ]1 t" \5 A/ G a# r
| 








