|
0 Y6 P! e3 B0 |$ O 作者:AIRX I0 x2 f. R; X9 `
Date:2020-09-10 来源:AIRX社区微信公众号卡尔斯鲁厄理工学院(Karlsruhe Institute of Technology)展示了一种可在移动设备上以AR的方式来可视化机器人数据(ROS)的应用程序:iviz。论文获取链接关注公众号AIRX社区后台回复:iviz ' l& \% z. Q! @/ D+ H
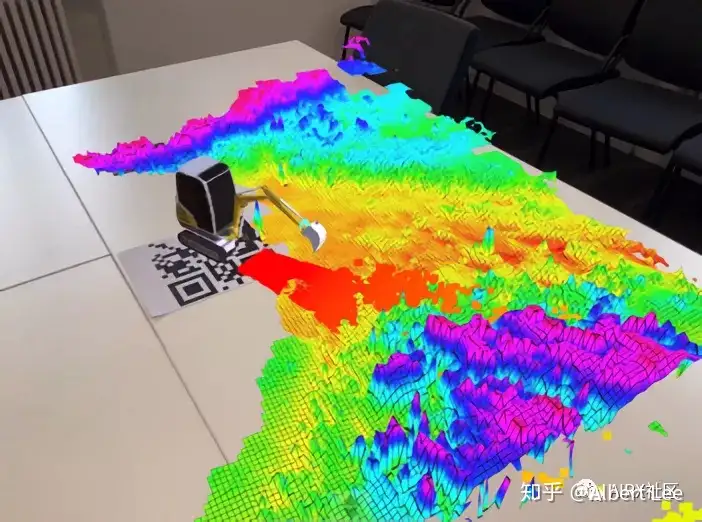
; f1 g. R) q3 x x2 S 机器人操作系统(ROS)是最受欢迎的机器人软件框架集合之一。但是它的可视化工具并不是很方便,这促使卡尔斯鲁厄技术学院的研究人员为移动设备和AR眼镜(例如微软的HoloLens)创建了增强现实应用。这款开源应用程序是使用Unity开发的,被称为Iviz,它使机器人专家可以查看ROS数据的一系列可视化效果,包括点云和交互式标记。 $ e$ P8 P! B2 I: M( c" V. k
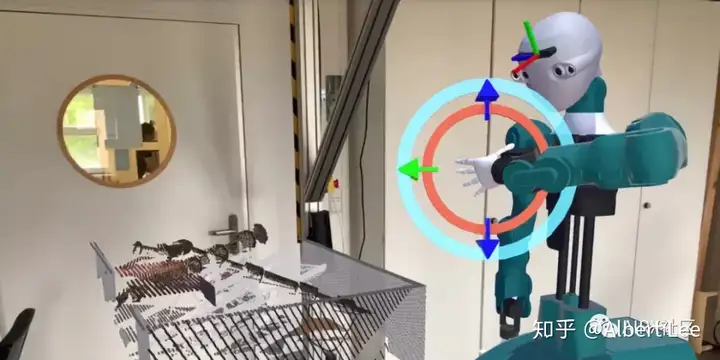
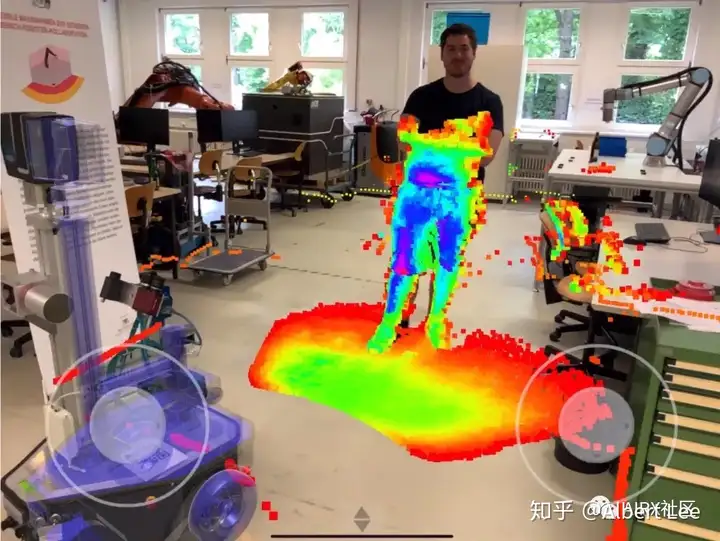
8 D# p2 ~! }& t7 N8 s: h Iviz是跨平台的,支持Windows,Linux,MacOS,iOS和Android。一个模块可以在仿真中实现机器人的AR可视化,并可以用交互式标记进行注释,这些标记表示诸如目标关节位置,要抓握的对象以及场景的可移动起点之类的事物。该模块支持虚拟操纵杆的遥控操作,使Iviz用户可以控制真实世界的机器人并可视化数据,例如覆盖在激光雷达传感器视场内物体上方的激光雷达点云。
/ T. }! {$ y; r1 z, K$ n" C 通过与移动设备的兼容性,iviz主要旨在解决一个问题:用户与PC的连接。现在可以直接在机器人的位置查看数据,这可以提供重要的基于上下文的信息。
& j: t7 `& `3 \/ |
, p' @' ?( `- w* V AR应用程序可让你使用AR眼镜控制机器人。例如,通过iviz的AR模块,你可以向机器人添加交互式标记。这样可以在空间上抓住物体或显示目标关节的位置。使用虚拟操纵杆和Microsoft Hololens 2,你可以在真实环境中控制机器人,并使其与虚拟对象进行交互。 , H& G9 n: u, u
! r% _9 O; e% \+ u. X: l
从广义上讲,Iviz是围绕显示或可重用代码的概念构建的,该代码可渲染诸如线,点云和重复的网格之类的对象。正如研究人员所解释的那样,这避免了一次渲染多个对象而导致的计算成本,因为iviz不会破坏并重新创建对象,而是回收丢弃的对象。例如,如果不再需要由多维数据集构成的框架轴,Iviz会将多维数据集组件重新用作机器人的链接。 . n& F1 x o! Z0 P0 y
3 p. ~' Y% f- L$ B
P2 `1 t. q1 \/ L& e
9 V$ ]4 N( Z( w
" e" [0 M9 V! f! u9 f0 d: X! Q |