|
- }: A9 c; p: @+ s5 _7 h
原标题:多平台激光雷达与机载专用激光雷达,哪款精度更好? 7 u/ Q( g4 Q4 ]$ }# k* x
. T; W9 T/ k. i- `$ o' F! h
慧天地”关注我们 3 ]3 @% q, t3 i; c9 ?
4 |/ f8 K Y7 @* ~* B Riegl公司在2020年10月发布了新品激光雷达VUX-120,不同于Riegl早期发布的激光雷达VUX-1采用360°扫描,实现多平台应用(机载、车载、背包等) ,VUX-120扫描视场角为100°,只能用于机载平台。VUX-120于2021年6月国内开始供货,到目前为止国内已经交付了几十台,部分用户反应VUX-120与VUX-1在测量人最关心的测量精度上不一致,下面我们就来详细分析下这两款激光雷达的测量精度优劣。(为方便大家理解,VUX-120下文简称100°机载专用雷达,VUX-1下文简称为360°多平台激光雷达)
) D! U! p4 U+ N" H) F) N% I5 H* [3 u% C 1、为什么点云都会存在一定的厚度? + L- ?' v5 Z' d( x
激光雷达的测量精度最直接的就是体现在激光雷达所采集的点云的厚度上,激光雷达在进行测距时,存在一定的测距误差,这个误差由两部分组成,一个是随机误差,一个是示值误差。前者是指多次重复测量时,测量值在一定测距范围内波动的现象,在生产厂商给出的技术指标中,一般用精确度(precision)来描述,即重复精度。后者是指观测值与真值之间的差值,在生产厂商给出的技术指标中,一般以准确度(accuracy)来描述,即绝对精度。重复精度是一个统计量,通常使用多次测量的中误差来表示,而绝对精度通常使用多次测量的平均值与真值的差值来表示。当一台激光雷达的重复精度为5mm时,由于随机误差的分布符合正态分布,95.4%的测距值会分布在(μ-2σ,μ+2σ)的范围内,此时点云厚度为4σ,即2cm。若考虑到99.7%的测距值会分布在(μ-3σ,μ+3σ)的范围内,则点云厚度为6σ,即3cm。
, E0 a- q1 Y/ I3 C+ B 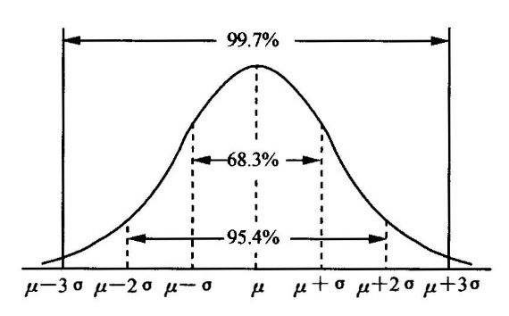
/ O% v) L |7 p 图 1 正态分布概率图
8 n3 g. f% J1 T. @; V' z& r" f 在实际作业过程中进行点云数据质量分析时,一般选择一块平的硬质表面(例如水泥路面或沥青路面)作为目标面,通过截取一定宽度(通常为±0.5m,总宽度为1m)的点云,在侧视图下浏览此段点云,通过量取最大高差位置的高差,来测量点云的厚度。 * f& z% H+ H2 e+ Q# I
下图为某一台360°多平台激光雷达采集的单航带点云,测量得到的点云厚度为2.7cm,与激光雷达标称的5mm重复精度指标基本匹配。
( w: @! z: \: H' D) ?4 A7 G 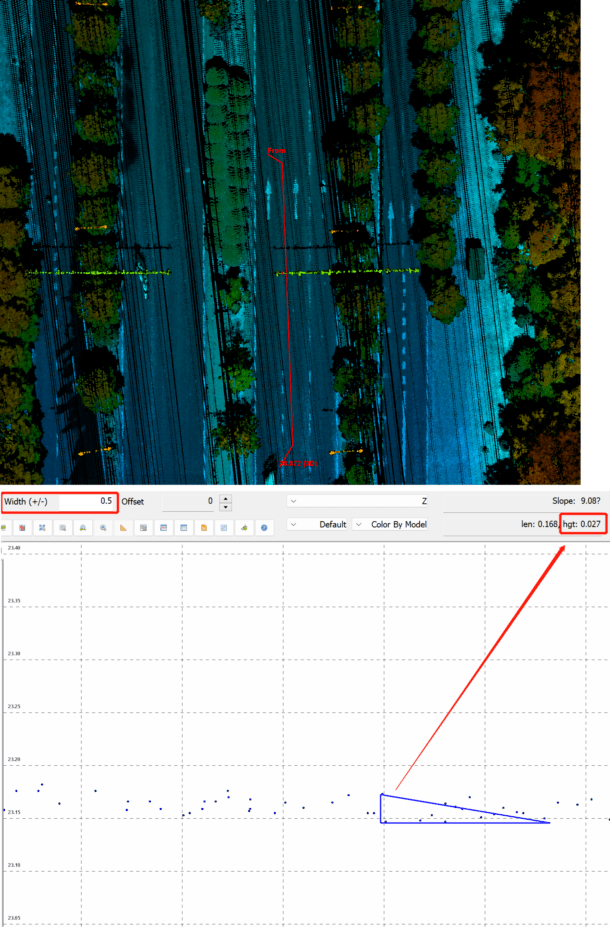
5 e1 q' N* k5 X' e
图 2 点云厚度测量图 & ^: @6 ^* W; H! |/ R) Y0 z: i
2、两款设备的扫描原理
* M7 _7 `/ t8 t. G3 Y& t, q# o 既然点云厚度主要取决于激光雷达的测距重复精度,为什么在测距重复精度均为5mm的情况下,100°机载专用激光雷达与360°多平台激光雷达的点云厚度不一样呢?这得从两款激光雷达的扫描原理开始说起。
. J7 J6 ~' C! F# Z, i* r: X 100°机载专用激光雷达使用塔镜作为扫描转子进行扫描,激光入射光线平行于旋转轴入射到每一个扫描面后,扫描面将光线反射到地物进行测距。随着三塔镜扫描转子绕旋转轴进行旋转,从而实现激光出射光的左右扫描。 " O$ ]' M1 o6 ]) V/ A$ E- A0 V5 @
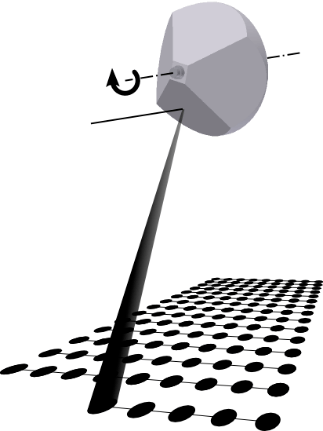
7 T2 {4 R) o" p4 l 图 3 三塔镜扫描示意图
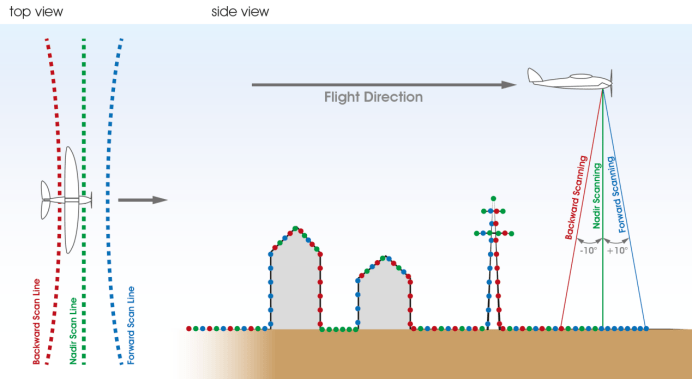
2 w2 b$ v9 N4 E! B& P3 y' y 在设计时,部分机载专用激光雷达的扫描面与旋转轴的夹角还会设计一定夹角,例如VUX-120的扫描面与旋转轴分别为45°、40°、50°,这样会使其在扫描过程中,交替出现三个不同方向的扫描线,与铅垂线(设备水平放置时)的夹角分别为0°、10°、-10°,示意图如下:
! p$ ]- U/ I, A) e% V' a 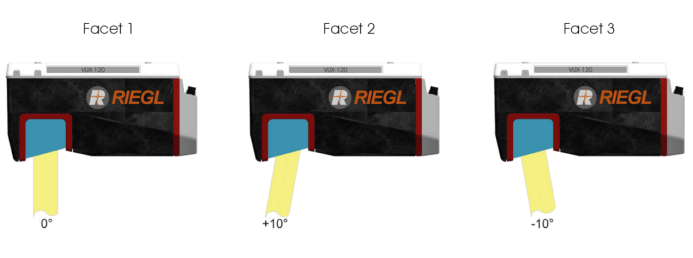
& a1 t# E7 K5 L0 |; P0 g2 b
图 4 扫描方向示意图 8 Z; h8 A8 o. s4 M
(图片来源:Riegl)
7 I) m0 ?& K9 s4 h. ~4 H$ O) E 在飞行状态下,其扫描示意图如下: ! Y4 C- ?: u+ A" G2 v
( t: f! {% \, H) n- G6 V
图 5 VUX-120扫描过程示意图 1 i c* R' k t2 D8 ^, `, L) j- p
(图片来源:Riegl) 0 N, G1 E$ E9 a( T
而360°多平台激光雷达一般使用45°转镜进行扫描,激光光线与旋转轴完全重合,地面上的地物在飞行过程中基本上只会被扫描一次(不考虑多航带重叠时的情况)。
+ k, O8 ^7 ^/ z, S3 I& c 3、扫描精度分析
% B0 r& O3 Y& ^ 1)100°机载专用激光雷达扫描转子各扫描面的标定误差
1 X8 p# B6 Z* \ 在计算100°机载专用激光雷达点云在扫描坐标系下的坐标(x,y,z)时,除了需要知道测距值D和编码器的测角值θ外,还需要确保激光光线与旋转轴的平行,并将各扫描面与旋转轴的夹角αi以及各扫描面之间的夹角βi精确测量出来。通常激光光线与旋转轴的平行通过精确的装调来保证,但是也存在一定的装调误差(秒级或十秒级),而塔镜各镜面与旋转轴的的夹角αi以及各扫描面之间的夹角βi虽然是按照一定夹角进行设计的,但是在加工制造过程中,会存在一定误差。产品在生产时,会通过标定来得到αi和βi,而这个标定的结果也会存在一定误差(秒级或十秒级),这就导致最终计算出的点云坐标存在一定的误差,把多个扫描面所扫描的点云合起来时,会出现轻微的点云分层的现象,总体表现就是点云偏厚。
+ ]3 n- X3 [ v9 c* W* I9 E 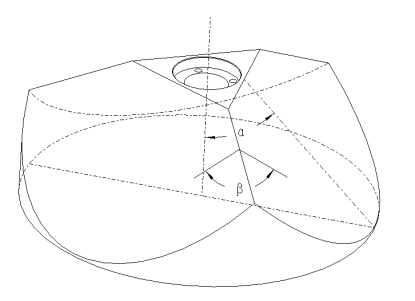
7 K1 Y+ v1 Y+ j( B9 n( ~8 D$ h 图 6 αi、βi示意图 4 L3 m" `) \# ~ E. u0 d2 k
而360°多平台激光雷达由于只有一个扫描面,因此不会出现上述问题。
5 i. A$ |& Y7 j3 p/ V+ q* Q 2)POS系统的定位定姿误差
6 T5 S) t- c" p @6 k: n! R" o0 { 激光雷达的原理可简要概括为:激光发射器发射一束光脉冲,光束经过运动系统带动的转子反射后对指定方向物体进行扫描,光学接收器接收由物体反射的激光,从而得到光脉冲发射和接收的时间差。由于光速已知,可以将时间差转换为激光雷达与测量点之间的距离。同时,利用POS系统提供的激光器的位置和姿态,根据几何关系即可计算出测量点的坐标。 / U( \0 _9 }6 v$ W
对于有不同扫描面角度的100°机载专用激光雷达,其在飞行过程中,会出现同一地物在不同时间,被不同的扫描面扫描。例如上图4中的100°机载专用激光雷达,其每个扫描面间夹角为10°,当飞行高度为200m时,各扫描面在飞行航线正下方的地面点间距约为35m,在飞行平台以10m/s的飞行速度进行作业时,地面上的某个地物,第一次在t时刻被向前10°的扫描面扫描到后,第二次在t+3.5s时刻又会被向正下方的0°扫描面扫描到,第三次在t+7s时刻会再次被向后方10°的扫描面扫描到。由于POS输出的位置和姿态在这7s的过程中存在一定的相对误差,导致三条扫描线叠加后,点云变得更厚。 0 F# C9 W7 p5 x* s( Z. k) t
而360°多平台激光雷达由于只有一个扫描面,POS输出的位置和姿态相对误差,不会对点云的厚度产生影响 。 4 Z! Q* M/ D" q. E) c
综上所述,360°多平台激光雷达从扫描面设计层面决定了其测量精度会高于100°机载专用激光雷达。 1 j/ c2 s$ }+ i0 S( X
4、实测对比 ! j- n/ L' Z& p
为了验证这个推断,我们使用360°多平台激光雷达VUX-1LR22和100°机载专用激光雷达VUX-120两款设备在同等条件下(同一时间段,同一地点,同一航线,同一飞行平台,GNSS与IMU型号、解算软件均相同)进行对比测试,对比相同航带同一地面点处点云厚度情况。 ) N$ [( _3 ]+ y4 m' D
在测试场中,我们总共选取了五处路面,查看不同设备的点云厚度,进行对比,取点位置示意图如下。 # y6 e1 U, X1 u, h6 T; F) ?- R
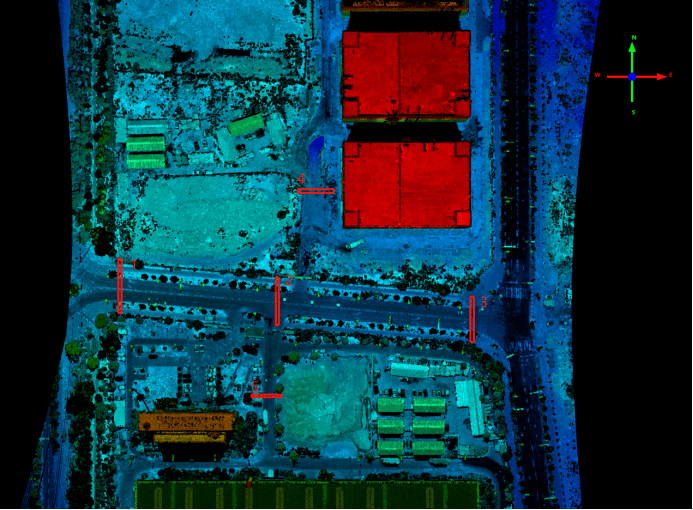
" A% p+ b, [4 Y( g- U 图 7 取点位置示意图 5 U/ s7 S. g; c/ S
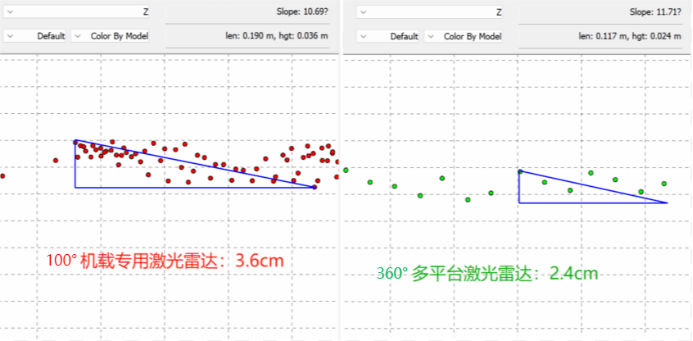
每处点云厚度对比图如下:
. Q5 h" p9 U, u& m 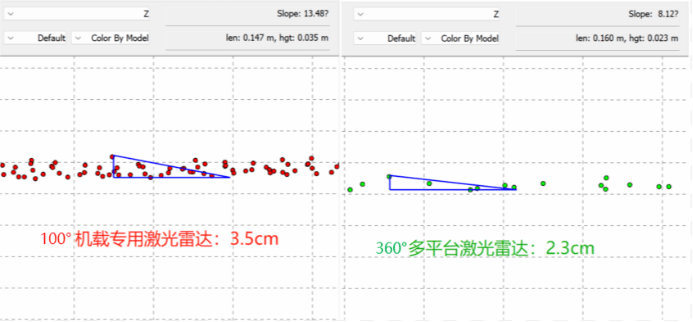
$ d# P" P. c" o 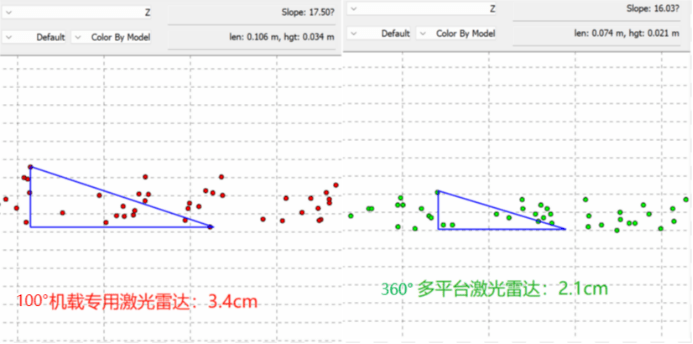
1 P, c- [+ T: Y' F1 ^6 Y 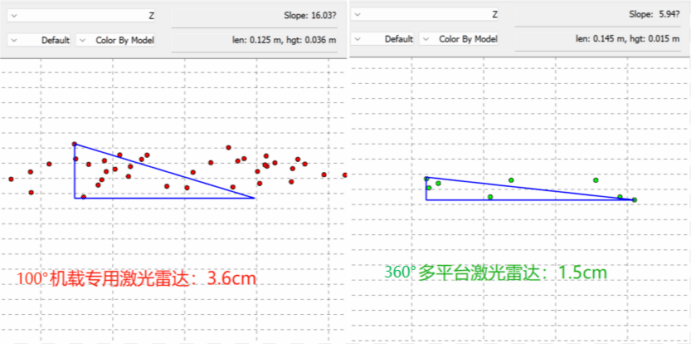
6 H9 q! k( {4 y. L 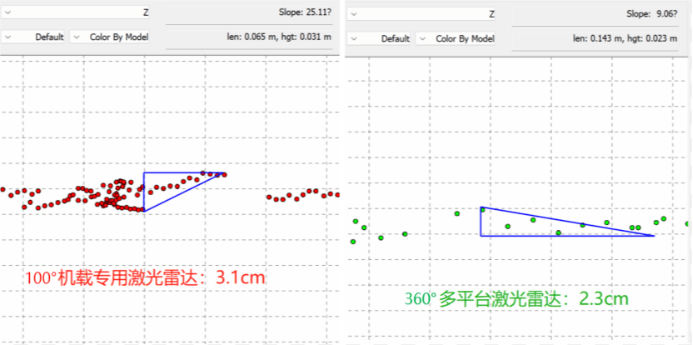
1 B( j) l, a0 {) e. e
5 B, }$ h0 o3 i+ h2 @. M
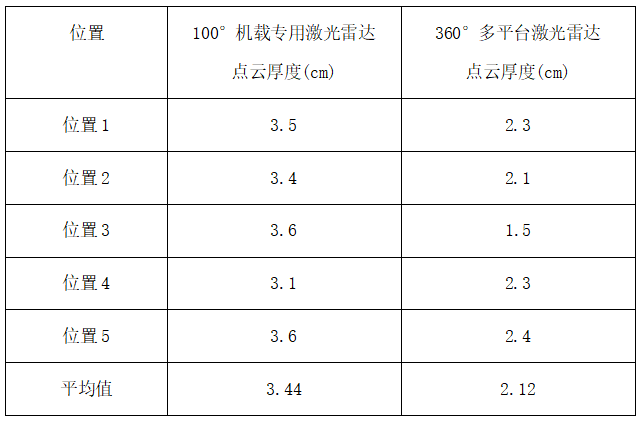
实测数据整理如下: M: j! O+ x. B& L6 Z7 L2 P$ `
" T# X7 |, [; ?* s
根据上面数据可知,100°机载专用激光雷达在五个参考点的平均点云厚度为3.44cm,而360°多平台激光雷达在五个参考点的平均点云厚度为2.12cm,100°机载专用激光雷达点云厚度平均比360°多平台激光雷达厚62.3%。
, Y) D: ^& P; a4 C! _. S 特别说明:Riegl的VUX-240机载激光雷达,使用四塔镜进行扫描,每个面与旋转轴的夹角设计值均为45°,四个扫描面之间理论上不存在夹角,因此POS在短时间内的相对误差对其点云厚度几乎没有影响,但是各扫描面间的标定误差同样存在,同样会导致点云偏厚。
: D# q8 k$ ?. P8 p8 R 5、总结 5 ]' V5 y0 }3 y; k* `" C
通过前面的理论分析和最后的实测对比,我们可以得到下面的结论: ( X2 G/ Z6 }7 Z, q
360°多平台激光雷达比100°机载专用雷达的激光点云厚度更薄,更薄的点云意味着后续绘制地形图的测量精度更高。另外,更薄的点云可以有效提升地面点滤波算法的准确度,减少在滤波分类时的人工操作。所以,在公路定测、城市测量等要求1:500测图的高精度测量场景下,360°多平台激光雷达是比100°机载专用激光雷达更适合的选择。
7 V5 M. `8 J7 C. X' h 荐读
+ O n6 W2 F7 W0 j% { 激光雷达全部自主研制“海洋光学遥感探测机理与模型研究”项目完成秋季联合共享航次 8 o/ T+ E+ z* N; u! R# h4 y' _ p
全波形机载测深激光雷达系统研制及其数据处理
6 A7 u. N6 U# N0 l8 t 激光雷达(LiDAR)点云数据知多少? 3 X5 h- o0 _- W
《慧天地》敬告
# W5 u6 V' Q: D/ \7 \ 《慧天地》公众号聚焦国内外时空信息科技前沿、行业发展动态、跨界融合趋势,发现企业核心竞争力,传播测绘地理信息文化,为时空信息类相关专业学子提供日常学习、考研就业一站式服务,打造政产学研金服用精准对接的平台。 7 M0 U) g1 e+ j/ i4 B
《慧天地》借鉴《读者》办刊理念,把时空信息领域的精华内容汇聚到平台上。我们高度重视版权,对于精选的每一篇推文,都会在文章开头显著注明出处,以表达对作者和推文引用平台版权的充分尊重和感谢;对于来源于网络作者不明的优质作品,转载时如出现侵权,请后台留言,我们会及时删除。感谢大家一直以来对《慧天地》的关注和支持! , [' y% n8 p" H% b! b, t8 V
——《慧天地》运营团队
" C& a4 l# D6 R; ]2 o9 ^/ F( j 投稿、转载、商务等合作请联系
% B; d% o5 N. \$ ] 微信号:huitiandi321
! k/ J+ \6 _0 q1 p) @- _ 邮箱:geomaticshtd@163.com 0 V# D! `* {8 F4 G& {, u& E. n
编辑:吴世杰 审核:蔡丽华 - ?3 \" Q8 J: P& x9 V; `) U6 e( E
指导:万剑华教授返回搜狐,查看更多 & c( I8 v' W1 f; X. ?' b8 t% W {
* w) s) k5 O) g7 B7 R
责任编辑:
9 k5 }9 E8 e- L9 r, J D
, z+ j* u/ ]0 t5 z" E- R
2 o4 ?7 A8 r3 I5 R- d& S) ]. d2 w( q& o. f# {! h
! l/ a$ Y9 [7 f* H' u+ y
| 














