|
从OOI海底观测网到雪龙号海洋考察船,从11000米的海神号ARV到7000米的蛟龙号HOV,作为海洋学研究的关键性设备,ADCP和DVL 是同一种技术的两种应用,很多时候是同一的电子平台的针对两种工作模式的不同优化配置。 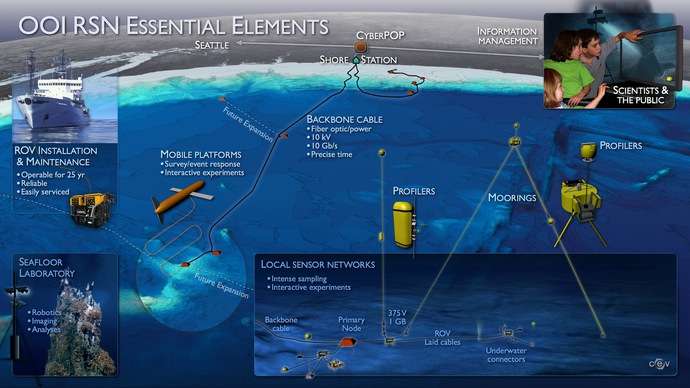 5 c7 |. f4 n' S2 z2 _6 W. W# S) N* }3 ?5 |
登录/注册后可看大图 5 c7 |. f4 n' S2 z2 _6 W. W# S) N* }3 ?5 |
登录/注册后可看大图
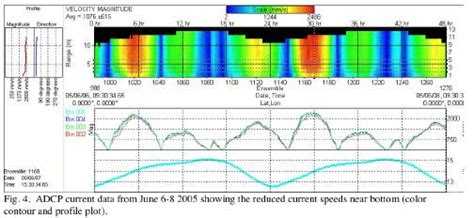
1,ADCP acoustic doppler current profiler 声学多普勒流速剖面仪,四个换能器波束垂向倾角20°,针对测流优化。 固定模式下利用水剖面工作模式的短脉冲测量不同距离上水流相对于仪器的三维速度,获得同一地点的时间序列流场变化, 走航模试下还需要同步的底跟踪工作模式长脉冲测量仪器相对于水底的三维速度,两者矢量差得到相对于地球的绝对速度流场剖面, 以及回波强度,相关度等信息,用于波浪潮流等物理海洋学或者其他海洋科学的物理过程研究。 2,DVL doppler velocity log多普勒速度计程仪,四个换能器波束垂向倾角30°,针对导航优化。 缺省只利用长脉冲测量仪器相对于水底的三维速度,用于水面和水下平台的高精度导航和姿态控制,作为一阶导航数据传感器(速度)与零阶(位置)的GPS 和USBL,二阶(加速度)的惯导和陀螺仪相互补充形成高精度的组合导航系统,支持包括AUV/ROV/HOV的水下探索。 DVL在开放大洋中不能打到水底的时候可以选择特定范围的水层作为导航参照,如果需要也可以打开流速剖面模式。 3,换能器倾角的差异使得ADCP 测流精度高而导航稳定性低,DVL导航稳定性高而测流精度低。如有需求可以后续专门讲解。 4,以Teledyne RD Instruments九十年代广泛应用至今的Workhorse 系列为例,DVL 与ADCP 使用相同电子平台,换能器倾角分别为30°和20°,涉及工作流程的固件和各项缺省参数有所不同。 5,有四个甚至多个换能器的是活塞式换能器,一个大换能器的是相控阵换能器,工作原理相同,差别在于同等频率和量程下,相控阵换能器的ADCP/DVL 体积更小,适装性更好,波束更窄,指向性和空间分辨率更好。 6,除了TRDI 之外,Sonardyne,Sontek,Nortek,Linkquest,RTI,杭州瑞声,锦州航星,中海达等公司也有相同原理各有优势的ADCP/DVL产品,如有遗漏欢迎补充。 7,作为一种物理海洋学和水下导航的关键型传感器,与平台和应用策略的优化组合,是ADCP/DVL发挥用处的关键。 8,所有的传感器都不是数据黑箱,都有自身的科学假设前提和性能包线,一有机会就会撒谎,但却会引出更多的迷人未知。边界之内的是工程与科学应用,边界之外的是广阔未知,边界之上的是新发现的契机。 欢迎更多的交流与分享! | 

 * @- K# A1 b* I& p7 X( w2 w/ x
* @- K# A1 b* I& p7 X( w2 w/ x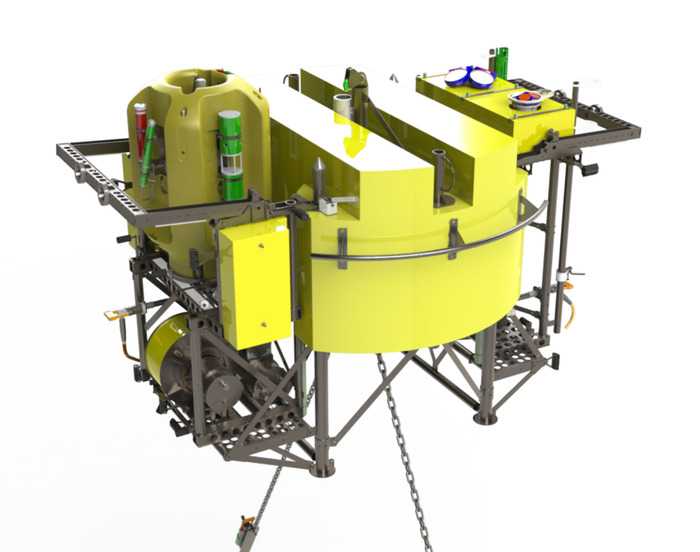
 . Y" d; g1 U, j! ]" a
. Y" d; g1 U, j! ]" a
 ! B$ N* p% R, G( h7 G' G
! B$ N* p% R, G( h7 G' G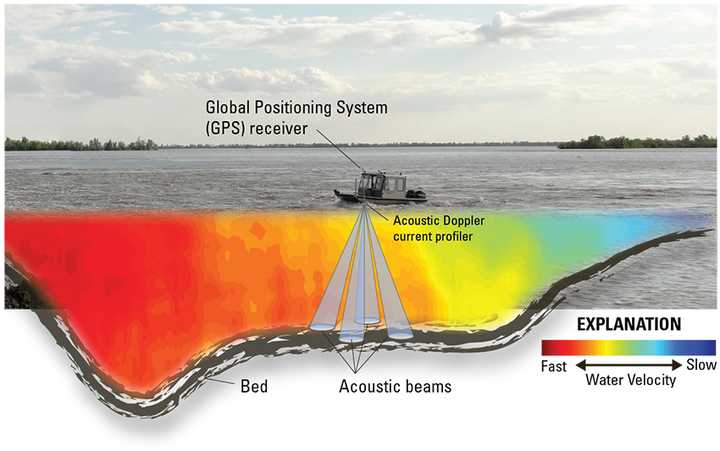 1 D& ~9 K3 r9 _' u. A
1 D& ~9 K3 r9 _' u. A
 1 D I9 M( _( v% E. f# H
1 D I9 M( _( v% E. f# H