|
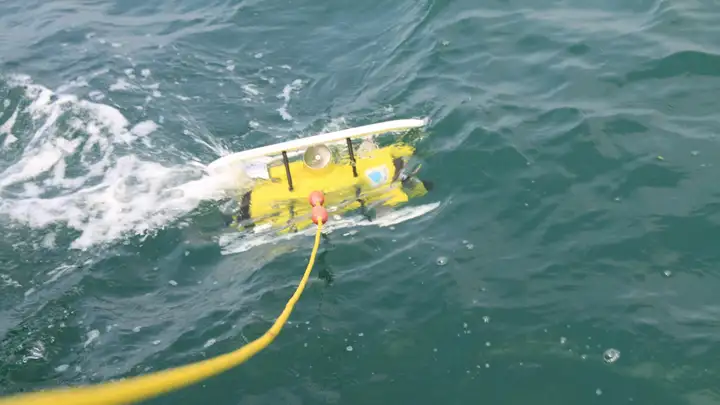
: g6 h* W, V; h! |5 \5 K 有缆遥控水下机器人(Remote Operated Vehicle,ROV)是海洋资源开发和海洋工程搭建以及海洋环境保护作业的主要利器。水下机器人在海洋中受到洋流、重力浮力、脐带缆线作用力等影响,作业环境十分复杂,因此对水下机器人运动控制技术的研究非常关键。
7 @; L4 x" x& m% b6 [- \ M/ }- F8 v 本文对有缆水下机器人运动控制技术进行研究,对现有的水下机器人运动控制算法进行分析。结合水下机器人在水中的受力情况,对其进行动力学和运动学分析。选用PID和模糊自适应PID算法设计了定深、定艏运动控制器,采用Matlab中的Simulink模块对定深、定艏等运动进行了模拟仿真。
0 d: x9 {6 J1 U 本文结合上位机和下位机通讯原理及CAN总线协议等对水下机器人控制系统总体方案进行设计。本文介绍了水下机器人本体结构、整体通讯方式和水下机器人传感器数据采集的方法,通过卡尔曼滤波对MPU9250陀螺仪等传感器数据进行处理,得到水下机器人的准确数据和姿态。对水下机器人控制系统的硬件和软件、以及上位机控制界面进行了模块化设计,基于Free RTOS操作系统对水下机器人通讯、传感器数据采集、运动控制等进行多线程调度。采用Bootloader远程更新ROV最新的控制代码。为了实时监测水下环境、保证其安全高效的作业,设计了两自由度深水观测云台结构及其控制系统。 ; k( A$ U N& j
本文在下位机STM32F103控制板上实现了水下机器人定深、定艏、以及定深定艏6自由度运动矢量控制,采用TCP/IP和RS485-Modbus协议实现地面工控机和下位机控制板的双向数据传输和采集,通过CAN总线控制6个无刷直流电机的运动控制。 b/ } S9 C2 C' u2 [5 x" z
人通过上位机控制平台可以实现水下机器人定深定艏等运动控制,通过监视器可以实时监控水下机器人姿态、位置等状态,上位机控制界面可以实时显示采集到的多传感器数据。
# @1 a3 o$ B! m- Y- j0 V9 E( y 经过对水下机器人运动矢量控制校内水箱和海试实验,验证了本文所设计的水下机器人运动控制器及控制算法能满足水下机器人定深、定艏以及定深定艏结合的6自由度运动矢量控制要求。
8 u! P. F9 }/ K7 ?2 D; d5 }& z 关键词:水下机器人;运动控制技术;PID控制;矢量控制;STM32;FreeRTOS; ( H: n7 T: Y) R4 i! L7 A
专辑:信息科技
7 q/ J4 q" ~0 |7 Z 专题:自动化技术 1 m; _& x7 K/ J
学科专业:工程硕士(机械工程)(专业学位)。 6 z2 p6 P& v' @
( v. ~& N& k5 x9 @# x8 B8 L
R& t: X+ {9 }# k, F
. S! ?) `$ }- P- i8 Z' m
% a$ K' D1 j5 B: j3 Q( Y% t! _% e
|