|
: \" D7 {) V! M% p 点击上方“北大海洋”蓝字 爱上我~
9 w) _8 e. _; b E  海洋科考船上的设备知多少?海洋科学分类比较多,大致可以是:物理海洋,海洋化学,海洋生物,海洋地质,海洋物理 and 海洋气象等,那就从这里选取几个角度说说科考船上的设备吧! 海洋科考船上的设备知多少?海洋科学分类比较多,大致可以是:物理海洋,海洋化学,海洋生物,海洋地质,海洋物理 and 海洋气象等,那就从这里选取几个角度说说科考船上的设备吧!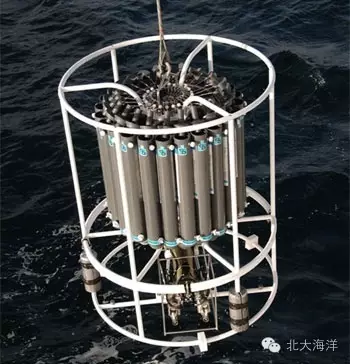 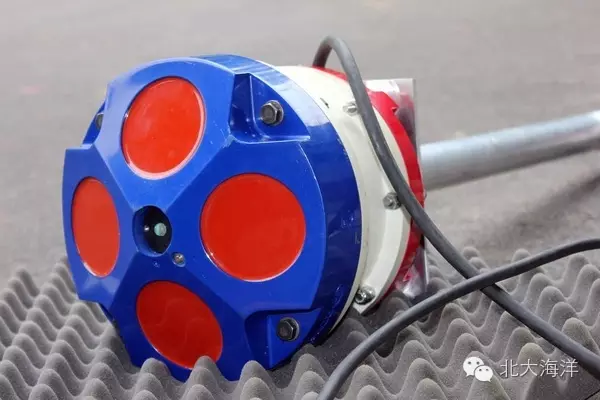     1. 海洋物理a. 基本的CTD(温盐深)设备海洋科考船上基本都是必备,就是测量海水温盐深度的设备,有的大型CTD上还带着采水器。还有专门用于走航的CTD,挂在船尾,用一个小型绞车拖着。b. ADCP(多普勒流速剖面仪)测量海水流速方向的设备,有固定地点测量,还有的直接装船上。c. 船载测波设备通常用雷达测波的比较多。测量船只周围波浪海流信息,波高方向速度等。d. 探测类设备大多是声学方面设备,如旁扫声呐,侧扫声纳,浅地层剖面仪,等有些装船上,有些是用船上吊车绞车拖着。2. 海洋生物
; |/ U/ e9 S: T" {( j* i: \3 e 1. 海洋物理a. 基本的CTD(温盐深)设备海洋科考船上基本都是必备,就是测量海水温盐深度的设备,有的大型CTD上还带着采水器。还有专门用于走航的CTD,挂在船尾,用一个小型绞车拖着。b. ADCP(多普勒流速剖面仪)测量海水流速方向的设备,有固定地点测量,还有的直接装船上。c. 船载测波设备通常用雷达测波的比较多。测量船只周围波浪海流信息,波高方向速度等。d. 探测类设备大多是声学方面设备,如旁扫声呐,侧扫声纳,浅地层剖面仪,等有些装船上,有些是用船上吊车绞车拖着。2. 海洋生物
; |/ U/ e9 S: T" {( j* i: \3 e 这个主要是藻类方面,有一些化学方面设备也能用到,比如营养盐等。鱼蟹虾类生物不在内。 a. 流式细胞仪! x% ]# c' G* D* b: n3 D$ a+ M7 n" p
这是放在实验室里的,有水泵抽水到实验室里走样测量。 b. 水下原位的流式细胞仪: I; R% C$ @: F# ?. c7 z) V; @4 A
在水下40米以上,对水里的物质进行测量。拍照,计数等。 c. 海水沉积物捕获器d. 浮游生物采样网e. 生物拖网  看这里看这里,你知道这些科考船装备吗??? 1. 测深仪(或称单波束) 2 g" X7 y5 f0 L9 X$ L 看这里看这里,你知道这些科考船装备吗??? 1. 测深仪(或称单波束) 2 g" X7 y5 f0 L9 X$ L
系统配置:测深仪换能器、工控机,定位系统(GPS),需要实时验潮
" Z. v" P* B% A$ z6 o 作业方式:船体安装,走航测量,岸上验潮或RTK潮位修正 & i# k0 }8 D% I7 O1 p6 W
著名厂商:加拿大KNUDSEN公司 美帝ODOM公司 天朝海鹰公司 关键词:时深转换 声速改正 波束角 运动改正
) g$ g+ { A4 l) R% \) d  4 i4 ]5 o6 M4 s1 i# J 4 i4 ]5 o6 M4 s1 i# J
单波束可以说是所有声学探测设备的鼻祖了,其原理非常简单,就是前文中所提到的时深转换。但是原理简单并不代表着仪器操作简单,为了获得高质量数据和清晰的反射图像,现场控制依然有很高的要求,拿换能器吃水来说,太深的话不仅会受二次反射波影响,还可能威胁到行船安全,太浅的话水体噪声又太大,信噪比降低也会使数据质量下降。 对于单波束而言,声速改正是比较简单的,因为其声轴是竖直方向的,不牵涉声波的折射偏移,只需要对沿深度方向的水体声速进行分层定值或平均再做计算就可以获得精确水深;由于单波束是记录最短的信号往返时间进行水深计算,所以目前的单波束都在努力减小波束角,使到达海底的信号覆盖区域尽量缩小,以获得更为精确的水深数据,但是在海床形态非常复杂的区域,即使减小波束角,单波束测得的水深仍然会存在较大误差(图1);对于运动改正问题,目前在单波束测深系统中运用比较少,其原因在于单波束是记录最短的信号往返时间进行水深计算的,因此在船体的横摇(roll)、纵摇(pitch)小于波束角时仪器测得的水深是不受这两种运动影响的,只有船体起伏(heave)会对水深值产生影响(图2),但是一般在能够接受的海况条件下测量艇作业时受浪的作用起伏多是低频的,这种船体起伏对数据的影响可以在后期处理过程中通过分段平均的方式减弱,从而达到测量精度要求,因此,只要选择合适的测量艇,并将单波束固定安装在其重心位置处,就可以满一般测量的需要了。需要注意的是,当船体晃动严重时,波束发射会变成斜向,由此产生的误差会是相当可观的,且水深越大这种误差越大。 2. 侧扫声纳系统 ; w: X* A6 w7 a 2. 侧扫声纳系统 ; w: X* A6 w7 a
系统配置:声纳拖体、工控机,定位系统(GPS),姿态传感器(可选配),
( G' U d1 V# s% d5 U+ @ 作业方式:拖曳式走航测量, 7 ~: N- U; E7 ^- J5 j' y) }
著名厂商:美国Klein公司(已被L3收购) 美国EdgeTech公司 关键词:半定量设备 探测面积大 动员时间短 目标识别快
9 c1 I# L( a( Z. k  自二战以来,声纳就是各国海军发展的重点,尤其是冷战期间的反潜,反水下渗透破坏,侧扫声纳的识别精度、勤务性、作业航速大幅度提高,以Klein 8000型侧扫声纳为例,可在航速20节的条件下获得高清晰度的海底图像,当然,这玩意儿目前依旧对华禁运。侧扫声纳利用拖体两侧的换能器发射、并接收信号,然后根据信号强弱反演海床形态,因此也被商家冠以“地貌仪”的噱头进行推广。3. 浅地层剖面仪(简称浅剖)! g# X8 e# s0 \( u% n2 G: a% D4 |: A 自二战以来,声纳就是各国海军发展的重点,尤其是冷战期间的反潜,反水下渗透破坏,侧扫声纳的识别精度、勤务性、作业航速大幅度提高,以Klein 8000型侧扫声纳为例,可在航速20节的条件下获得高清晰度的海底图像,当然,这玩意儿目前依旧对华禁运。侧扫声纳利用拖体两侧的换能器发射、并接收信号,然后根据信号强弱反演海床形态,因此也被商家冠以“地貌仪”的噱头进行推广。3. 浅地层剖面仪(简称浅剖)! g# X8 e# s0 \( u% n2 G: a% D4 |: A
系统配置:换能器、工控机,定位系统(GPS)
6 S& r/ O" Q, ?: d6 D/ ^" U$ e 作业方式:拖曳式走航测量或采用船体安装 ! G1 s9 |1 l' Z: k8 n
著名厂商:瑞典Konsberg公司 美国Benthos公司 关键词:低频 穿透 参量阵技术 CHIRP技术 钻孔修正
. r! ~" E# w" {' w& P+ K  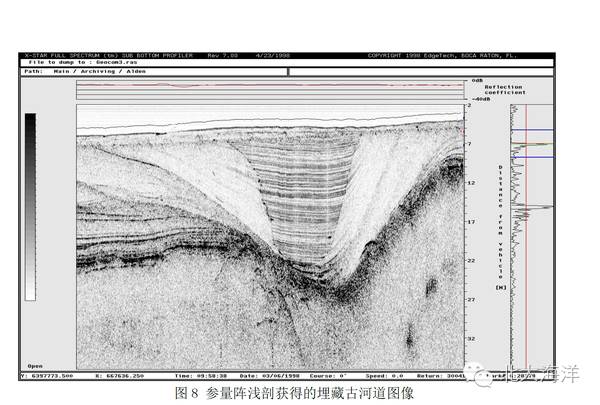  3 Z+ u" C. s( ~4 t
3 Z+ u" C. s( ~4 t 当我们需要获知海床以下浅部地层、灾害地质因素、埋设物等的分布情况时,需要使用一种工作频率相对较低,对海底地层有一定穿透能力的设备来实现,这就是浅地层剖面系统(图8)。这种系统的工作原理也是非常简单的,只是信号频率更低,能量更强,信号在各个声速界面上形成反射,水听器接收回波信号后即可形成声学地层图像。按信号频率从高到低排列,震源类型主要包括:压电陶瓷(晶体振动)、Boomer(金属撞击)、电火花(等离子体)等,当然这不是绝对的,比如参量阵技术,就是通过两个相对高频的信号通过相位叠加最终形成若干个不同频率的信号,其中就包含了频率极低的信号。
3 y# ~# J& J8 y- H2 P 在波束控制方面,目前有两个方向:在海洋地质调查领域,科学家往往关注地层的产状,以及浅部的特殊地质现象,因此需要在波束角尽可能小的情况下,实现波束稳定,使其始终垂直指向海床,压制绕射,减小地层产状变化对声学图像的影响 4. 多波束条带测深系统(简称多波束,或束控多波束)系统配置:多波束换能器、表层声速计,工控机,定位系统(GPS),定向系统(罗经),姿态传感器(三轴MRU),声速剖面仪(SVP),需要实时验潮作业方式:船体安装,走航测量,岸上验潮或RTK潮位修正0 F# _% p2 r2 P- ^, h) q
著名厂商:丹麦Reson公司 挪威Konsberg公司 关键词:束控 时深转换 全覆盖 声速改正 波束角 运动改正
9 ]# ?+ S1 q1 }3 z: ?7 {   & G. s# k. U3 }+ n) h3 U* u) H$ _9 Y" I & G. s# k. U3 }+ n) h3 U* u) H$ _9 Y" I
将若干个单波束成排放置,就可以得到完全覆盖其下方的水深值,但这样显然不够经济,覆盖宽度有限,且需要的换能器也太多。如果我们将一系列不同发射角的波束集中起来,使其向海底发射,然后记录往返时间,这样不但能探测更宽的区域,还能缩小换能器的体积,在这一思路的指导下,第一代模拟多波束条带测深系统诞生了(图5),当然多波束也是目前最为复杂,作业控制要求最高的系统。
9 ?+ ~ p) M8 R2 h/ \, E 转自:知乎  点击“阅读原文”& `/ t, o# H9 b; ?6 L5 V
5 s9 `; b. u/ {: N
+ S u7 m" \2 Z* b& H
9 Y z( ], u4 G7 d6 t* q
r: p# B6 b6 m! K8 I 点击“阅读原文”& `/ t, o# H9 b; ?6 L5 V
5 s9 `; b. u/ {: N
+ S u7 m" \2 Z* b& H
9 Y z( ], u4 G7 d6 t* q
r: p# B6 b6 m! K8 I | 

