|
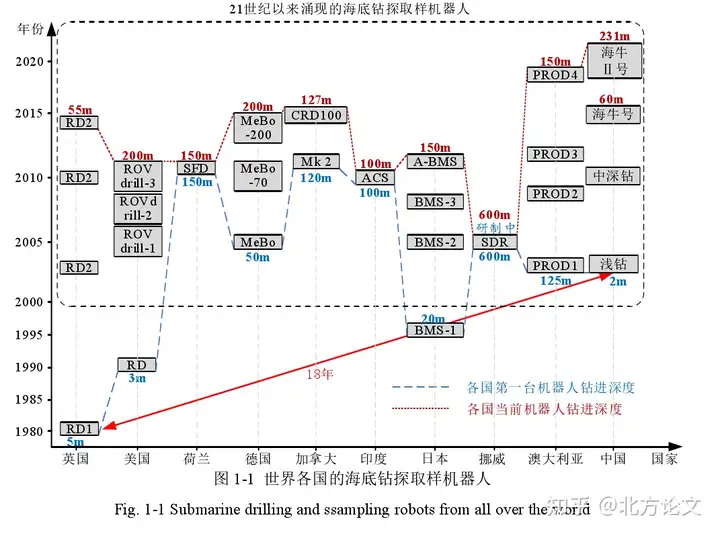
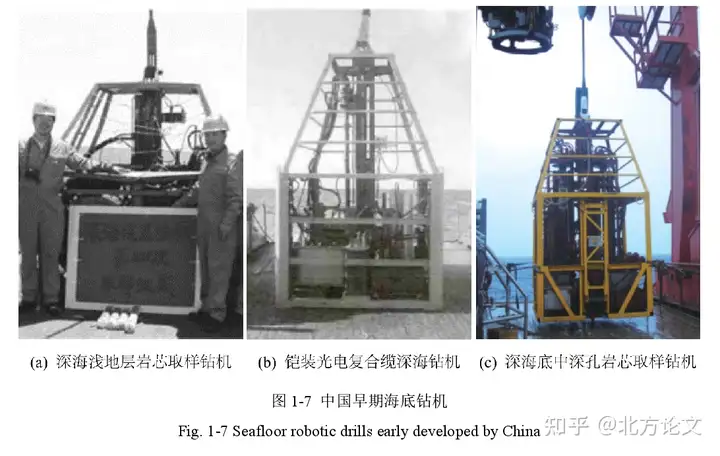
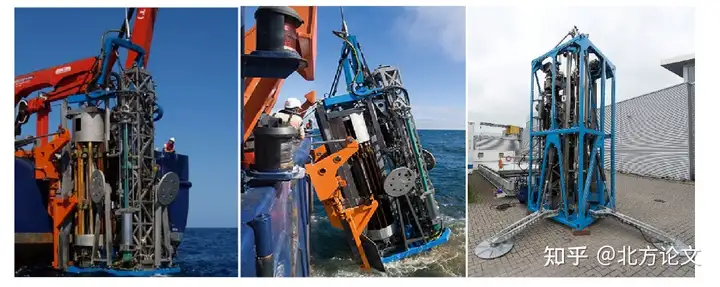
+ ` ]3 l( N0 P) `1 { 随着社会的发展,人口膨胀与能源短缺给人类可持续发展带来严重困扰,为此人们纷纷将目光投入海洋。对海底沉积物进行取样分析是进行海洋地质调查的重要环节,相比于从海面直接钻探的大型钻探船,海底钻探采样机器人因其作业的灵活性和作业成本的低廉性,在海底岩土勘探中起着重要作用,是世界各海洋强国争相研制的重要技术装备。而钻探取芯机构系统是钻探机器人的核心骨架,是岩土取芯任务功能的核心执行单元。
1 z1 g* D6 G! P* t; C1 K+ o) d 针对海底沉积物采样探测需求,本文设计了一套用于提钻取芯式钻探机构系统,具体内容如下:
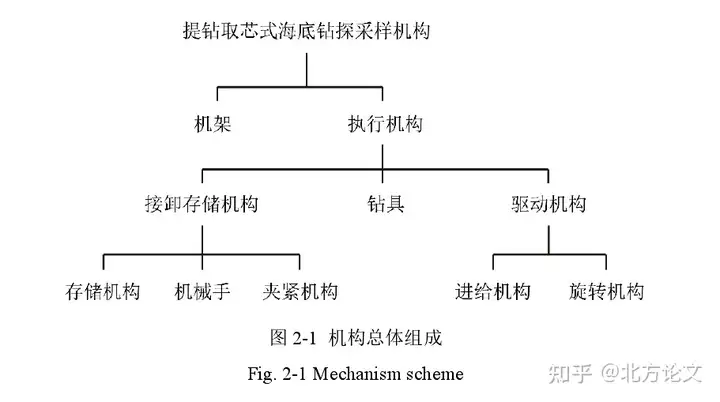
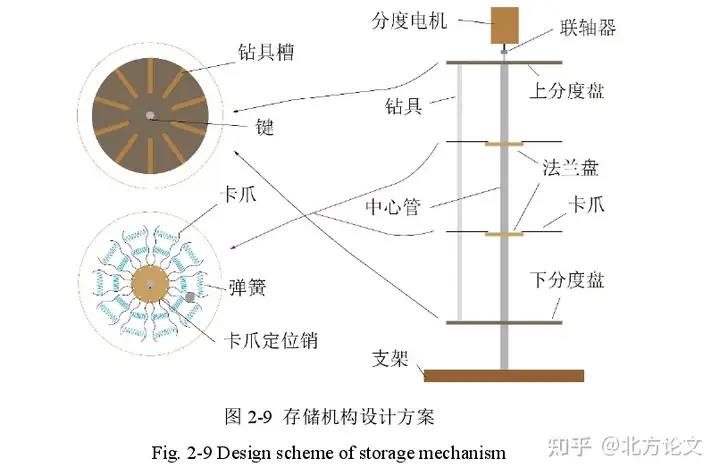
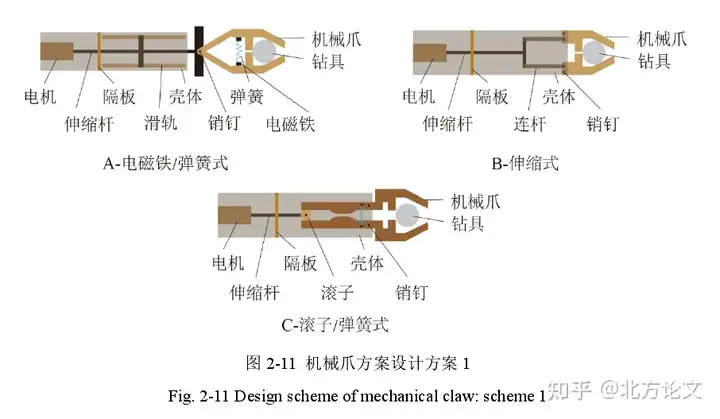
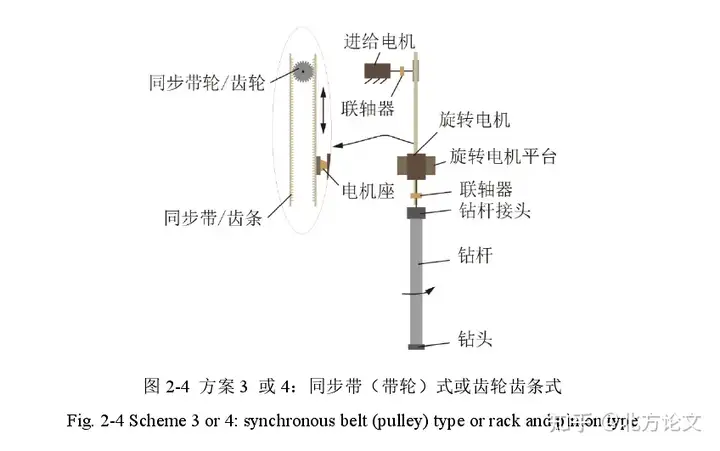
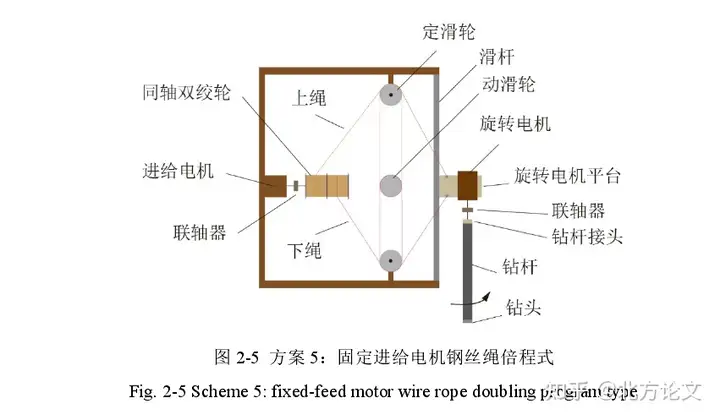
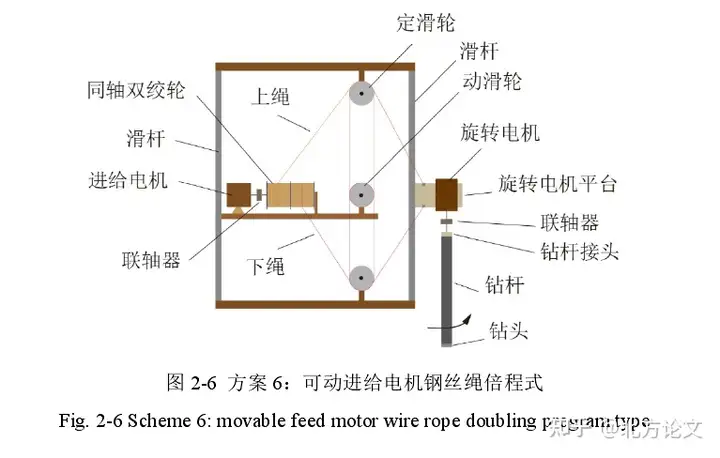
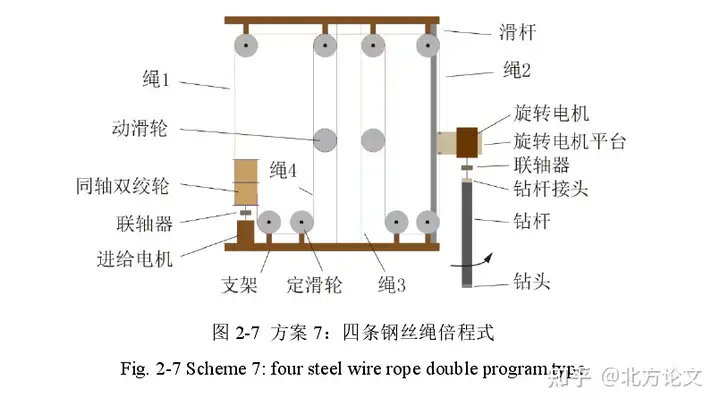
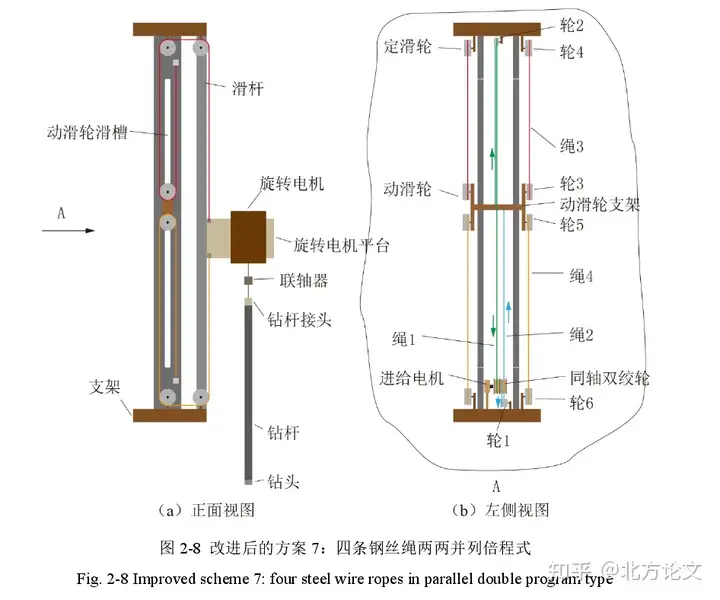
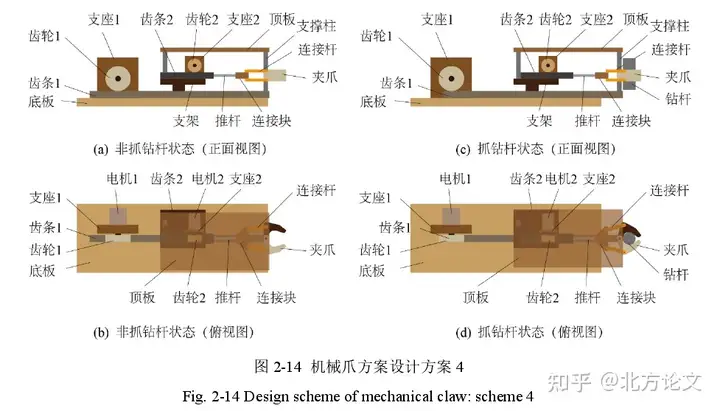
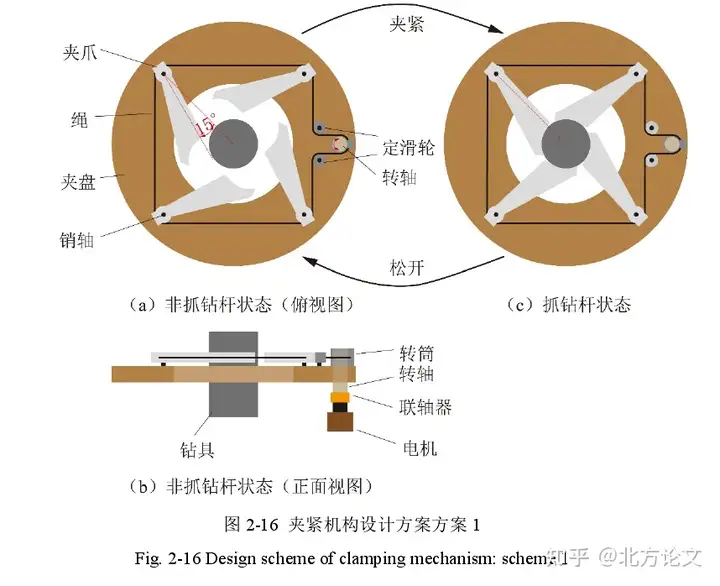
3 s# [! Z: { r2 Y( x 1、提出了一套提钻取芯式机构系统设计方案。由于考虑到单钻杆取样深度受到钻杆长度限制,因此设计了多杆接卸式取样系统,这可以极大扩充钻进深度。同时也考虑到在水下进行钻杆的自动接卸及存储要求,设计了多钻杆存储及接卸机构系统。此外考虑到整个机构的重量及尺寸对钻探工作难度、可靠性及经济成本的影响,设计了钢丝绳倍程钻进机构。根据提钻取芯功能需求,对机构功能模块进行了划分,包括驱动机构、接卸存储机构和钻具三部分。对每一功能执行机构进行了多重方案设计,并进行了方案对比分析及优选。
4 U3 W A7 d5 \) a& X* M4 n0 T 2、对机构的运动及力载特性进行了分析。根据所提出的机构优选构型,依据设计要求确定了整体结构尺寸及各功能实现机构尺寸,并利用Solid Works建模软件对各组成单元进行三维建模。根据建立的三维模型及功能需求,对各功能实现机构进行了运动及力载分析。为满足工作顺利可靠完成的要求,对各驱动构件进行了选型。
; f, h5 ^- A/ a- _* D/ i 3、对钻探采样力载特性进行了有限元分析。根据建立的钻具三维模型,利用有限元分析方法,通过ABAQUS分析软件导入了钻具数模文件,并创建了海底沉积物模型,构建了钻具钻进海底沉积物的分析模型,通过进行赋予材料属性、设置分析步及划分网格等一系列操作后,对钻进过程中的应力、应变及能量变化进行了仿真分析。
5 b$ @* p8 D" f; s+ ]+ t 4、对提钻取芯运动学进行了建模分析。根据各机构不同的功能特性及各机构间的动作序列需求,利用坐标变换方法,以钻杆从存储机构出发到回到存储机构为一完整的运动周期,对提钻取芯运动过程中的运动学进行了建模及分析,揭示了各实现机构间的协调运动机理,形成了运动序列,为实现采样工作提供了协调运动控制的方法。
/ [9 K0 m4 D$ @; v( U* \, v) { 关键词:机构设计;钻探机器人;仿真分析;提钻取芯。
7 a6 }/ g6 b }$ s3 T2 s 专辑:基础科学;工程科技Ⅰ辑。 : `) d/ r- Z) p/ o0 c$ c
专题:海洋学;石油天然气工业。 , z7 {( H' N ~, n6 X- k
学科专业:机械工程。
0 U; z0 W* w6 q/ m4 ~6 ~* m$ ?+ B
& ^, X: x: o5 _ m ; J6 o1 G8 U9 ^* U& r: [: H
. j9 ]- G! T1 c: I* f7 r
8 i9 x4 i o, ?& Y2 T / }5 m% j; u( w
+ Z7 H- } ], g9 N6 ^) i1 l- N" r
& N! G8 }0 s- N3 O d, y9 V- T! R5 ?1 }
; D! \) \7 I% V" t$ C- S8 y
- i0 U. |+ i7 u
r( b+ C$ [+ }3 B- Z/ @2 Y8 o6 L ; q$ A6 c* e6 m3 `
) D3 t5 |6 i6 T
! |3 j. `+ B6 l& i* v
2 o7 i V' @% g, i$ r9 Y. M % {9 o/ H; i' h, Z" E* h* C
( U4 o B& F" o, k3 }2 _$ x
# D& w5 X. q- L& J- E& \
' [; B4 f+ s/ z1 u- T. B6 D
6 d2 `. W! U/ Q; S. W # `" r0 k$ t% U% q. i! z* Z8 v
/ @, ~+ B2 x L) g+ n. V
; O+ l+ q6 y: @; K$ Y) \4 n" y
- h& t& F$ j {9 h! s/ [1 X
3 \ q' l$ D7 A( E/ S* K3 }' C" ?" `( }5 V
7 \+ [9 y: @8 I5 \, ~( r" j7 R4 V
|