|
& U0 D5 Z. d5 [ 1.大地测量 % m5 H" u7 s; H# k! i. e0 r; A
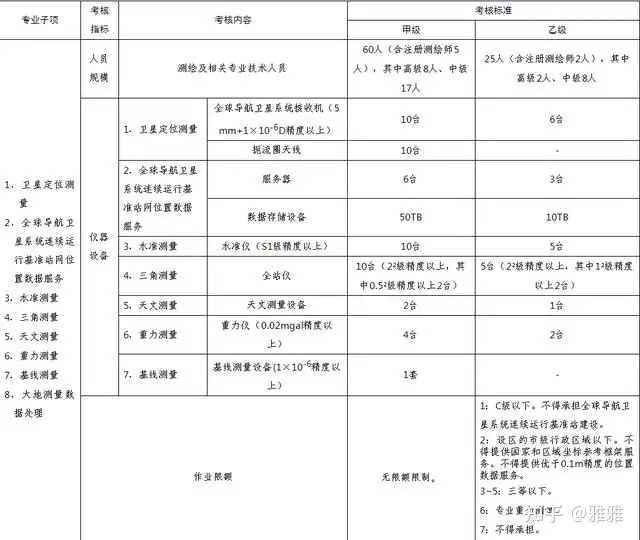
全球导航卫星系统连续运行基准站网位置数据服务是指通过若干全球导航卫星系统连续运行基准站、数据中心及数据通信网络等组成的系统提供位置数据服务的活动,全球导航卫星系统(GNSS)包括北斗卫星导航系统、GPS、GLONASS、GALILEO等。 $ g( O* j* Q2 @! O/ D% R) X/ ?8 r
7 S Q) H9 M. ~. k7 j$ b% e
. s( \2 s0 ~6 H& K- _1 h1 N 2.测绘航空摄影 8 v; |7 | k8 x6 n7 q: m# t' J
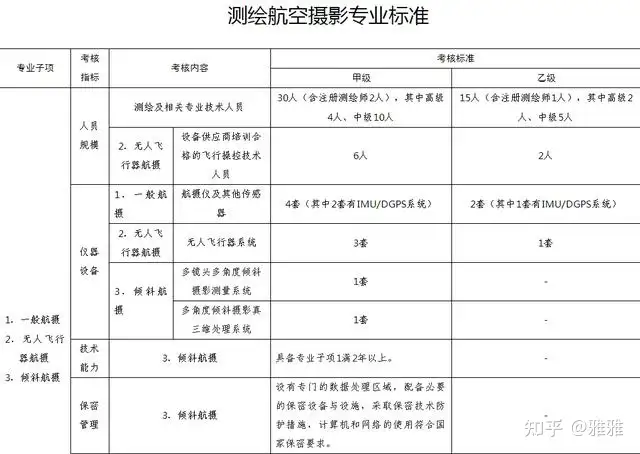
一般航摄包含胶片航空摄影、数码航空摄影、机载激光扫描、机载SAR成像。 4 s1 V# P7 n$ l
% H1 j% b( |( s3 K+ ?3 X
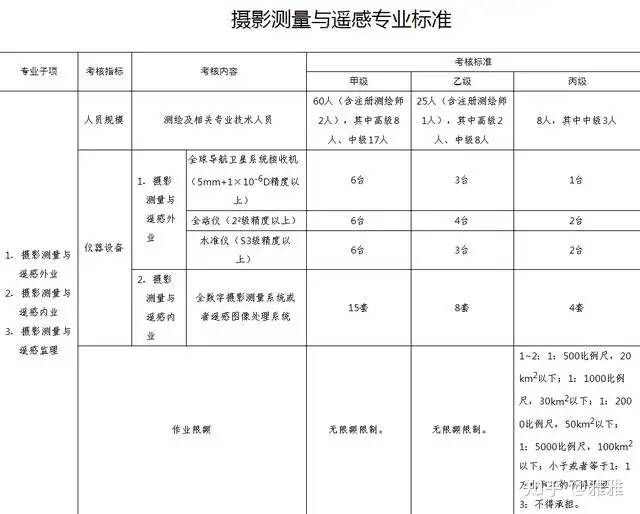
9 p$ G; m* s: G# f4 A# ] 3.摄影测量与遥感 从事高分辨率卫星影像处理与提供的单位,应当取得摄影测量与遥感内业专业子项的测绘资质。, w) I/ l7 q) X$ _# g6 u3 y! @; _
4 z: L6 G4 z+ b2 v! b
4.地理信息系统工程 * q$ ~: K: }/ F2 W+ _6 W, x* _! b
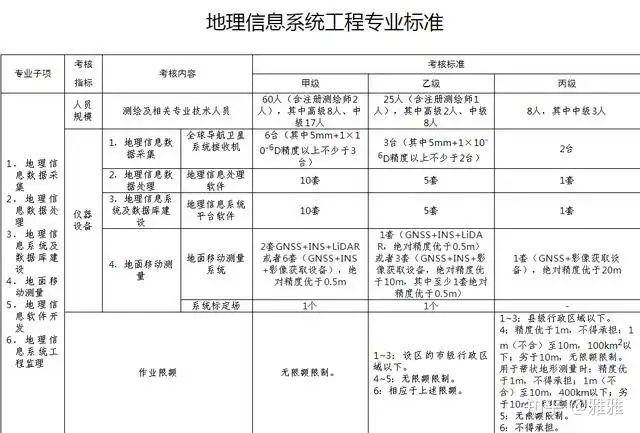
地面移动测量是指利用集成在地面移动载具上的多种传感器,在移动状态下采集各种实景地理空间信息及数据后处理的活动。
% c, u9 ]/ m% \# J' y8 ^" P! x) p( ^& H
% Y5 I5 t; e5 s6 w5 j
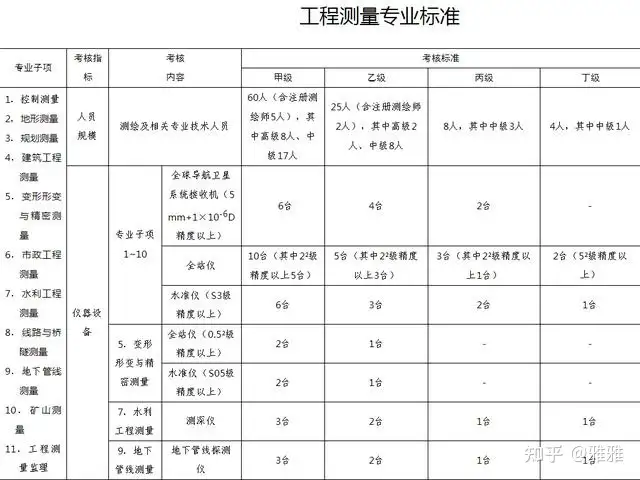
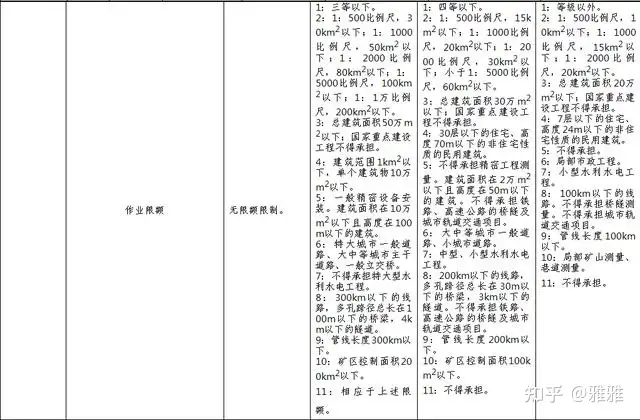
! e0 f0 |+ s# J. j 5.工程测量
8 v# y9 ?9 G) S/ A% [ (1)规划测量包含城乡规划定线测量、城乡用地测量、规划检测测量、日照测量。
- R+ h& v2 l% ` (2)变形形变与精密测量包含精密工程测量、变形(沉降)观测、形变测量。 (3)线路与桥隧测量包含线路工程测量、桥梁测量、隧道测量。9 `! ^& R. U7 ?+ ]4 v4 B4 a
( P4 z" n8 v3 B* c) A
& U1 u6 r% R7 F; a3 f
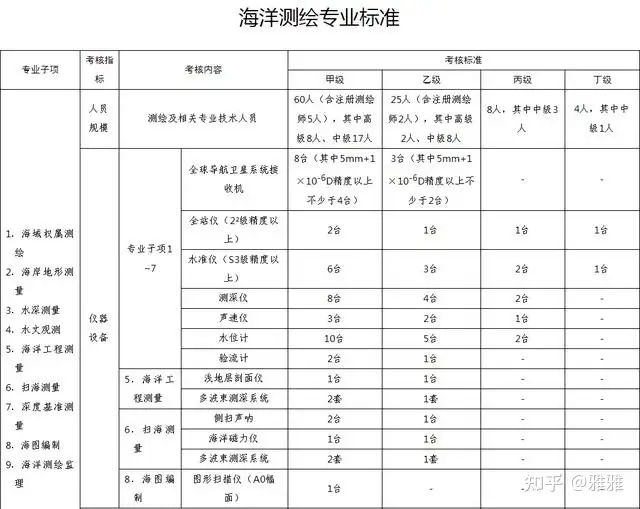
' R1 j! N2 g5 W6 F3 U* c 6.海洋测绘
- l* e7 u7 f; j# p( N, W) N (1)在内陆江河湖泊等水域从事海洋测绘活动的单位,应当取得海洋测绘专业范围的相应专业子项。
. d; O& \+ k$ n0 }, N1 O8 d9 R (2)海洋工程测量包含底质测量、浮泥测量、浅地层剖面测量、水下管线测量、港口与航道工程测量。 * n& ~' h2 D& R
7 P( j! j, A" L# J
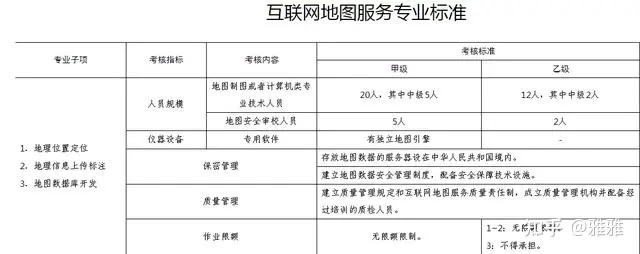
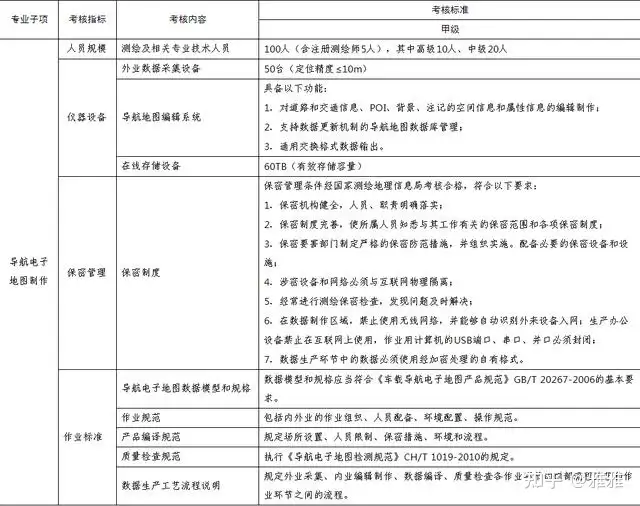
* k! t# {& d& Q. f/ H 7.互联网地图服务
# Y( U9 G5 ^( @# c5 x+ r8 Y (1)互联网地图服务主要包括地理位置定位、地理信息上传标注、地图数据库开发三项内容。通过无线互联网络调用的地图也属于互联网地图服务范畴。
, L9 i0 u9 x2 Z. N" P% {* [ (2)地理位置定位是指将空间坐标与互联网地图相应位置进行匹配,并进行地图可视化表达的服务。
- ~9 v- S+ y- A. e (3)地理信息上传标注是指允许用户在互联网地图上填写其感兴趣的信息并与他人分享的服务模式。这些信息包括但不限于名称、地址、分类、属性、影像、评论等。 / N$ x6 J8 j8 x
(4)地图数据库开发是指互联网地图服务单位开发互联网地图数据库和有关服务功能,供使用者调用、开发。从功能上包括但不限于地图显示、地图标绘、地图搜索、公交换乘、行车路线、地理编码、地理编码等地图服务,从形式上包括但不限于API、Web Service、SDK等各种类型的地图接口调用服务。 / ~+ {. b: G; y# ?( {( A5 w2 ~
+ g1 H Q2 n9 w/ C' r 0 [7 k1 o5 @ m8 q/ `
二、仪器设备 & m# }! W4 Q/ I5 n# k# ^
1.大地测量
& s' m8 G* ~# R; t+ B (1)天文测量设备:标称精度优于0.5²的天文经纬仪或者全站仪。
, k4 H( V6 A% r6 G (2)基线测量设备:用于基线测量的基线尺,其标称精度应当优于1/100万,24m长度基线尺不少于6根。 % i1 V- j, m9 v7 W0 S& z
2.测绘航空摄影 . Y* w Q8 R2 {$ b
(1)航摄仪及其他传感器:包括框幅式数字航摄仪(像幅不小于7000×11000),推扫式数字航摄仪、机载激光扫描仪、机载SAR。
3 Z8 R, ?" k: G# \5 T (2)IMU/DGPS系统:IMU是指惯性测量装置,DGPS是指差分GPS设备。
# r" z) Y: N5 Z1 ]0 ~* N (3)无人飞行器系统:每套含飞行平台2架、飞控系统2套、测控地面站1套、相机2台(像幅不小于5600×3700)。 5 b: h4 J4 c- G$ W
(4)多镜头多角度倾斜摄影测量系统:具备IMU/DGPS系统,具备5个以上镜头且每个镜头像幅不小于5600×3700。
+ T! T2 M, _+ j9 O5 V; L 3.地理信息系统工程 : S+ ^1 D" K5 K7 M% l+ C8 l' w- m
地面移动测量系统:是指将多种传感器集成在车载平台上,沿道路快速精确采集多元地理信息数据,并在内业环境中生产成图的快速多源数据采集和处理系统。GNSS是指接收全球导航卫星系统信号以确定地面空间位置的仪器,INS是指惯性导航系统,LiDAR是指激光雷达,影像获取设备是指立体相机、全景相机等用于地面移动测量的影像采集设备。 * F; a& a' Q3 `1 E# J# r! E
: a" Z5 V" y. B e9 S1 F
( ~5 H. y; {, f * ?/ G. e y9 I* X3 \1 A
三、软件 7 C; Z7 g$ Z" L, U2 v- K
1.测绘航空摄影
0 I4 }5 k3 N. [/ Z8 q- ~8 a( I 多角度倾斜摄影真三维处理系统:能够处理倾斜拍摄获取的多源数据,快速自动生成真三维数据的系统。 # b6 E2 ~7 i0 N/ O! o0 X
2.摄影测量与遥感 ' q& \, Y0 Q0 f6 G2 t- U4 i: ?
(1)全数字摄影测量系统:从影像获取到过程数据处理、成果输出,均采用数字化形式进行的摄影测量系统。
' s3 N- _- _6 Q0 c6 z (2)遥感图像处理系统:能够对遥感图像信息进行数字化、复原、几何校正、增强、统计分析、信息提出、分类、识别等图像加工的系统。 " G& \/ t5 e" t2 D/ i p% D
3.地理信息系统工程 4 K( D( j2 h9 f' o4 J& F! X% r
(1)地理信息处理软件:用于处理和分析地理信息的软件。
5 {& m/ B$ B: w2 u; f (2)地理信息系统平台软件:用于地理信息系统及数据库建设的基础软件,具备地理信息的获取、存储、编辑、处理、分析和显示等功能,并可支持软件定制开发。 : x" [/ Z/ O- V3 m- l0 s( b
4.互联网地图服务 独立地图引擎:部署于服务器上,能够向用户提供地图显示、空间搜索、上传标注、接口调用等服务的软件系统。$ s3 Y' ^5 H; X
* ?/ v# \' m5 [. n
: o; Y) }4 o# x' U4 B& f
8 K6 q% d8 U+ [$ ?, F; L0 i# A4 U. u( r% F* q( s8 D
|