|
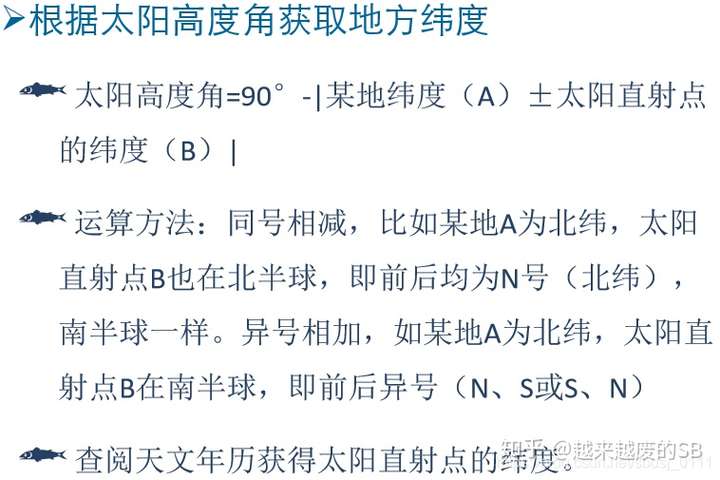
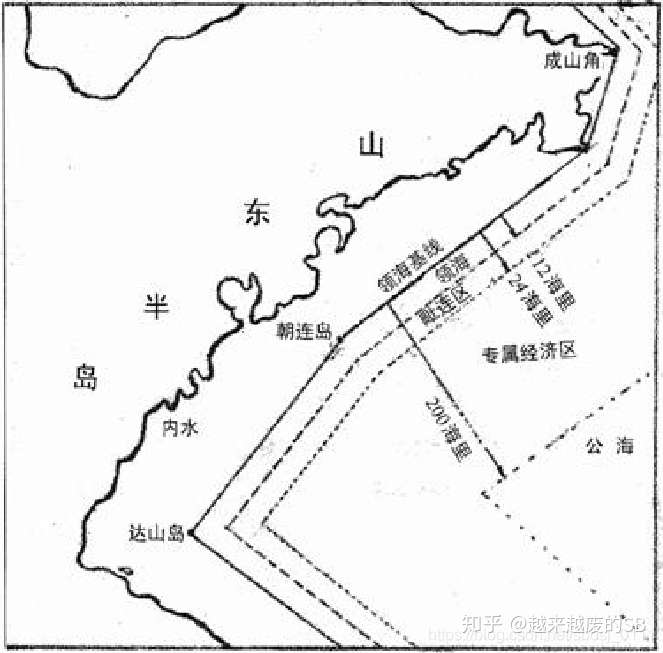
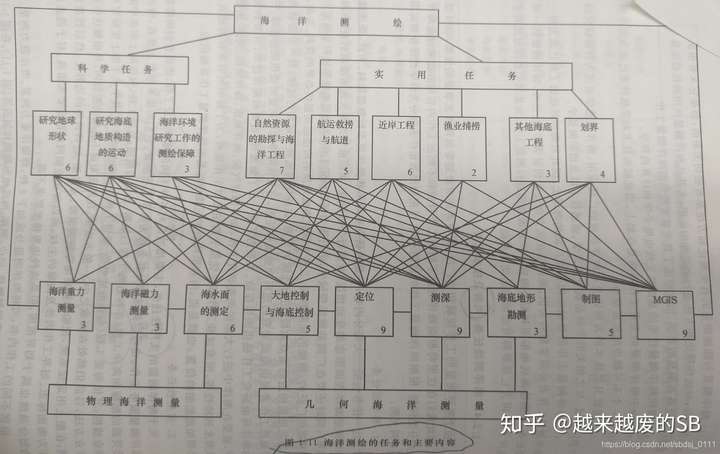
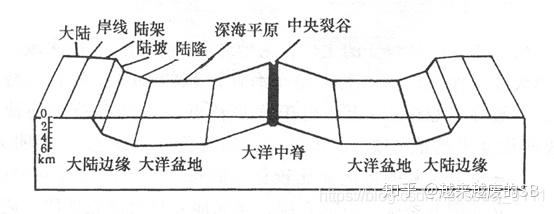
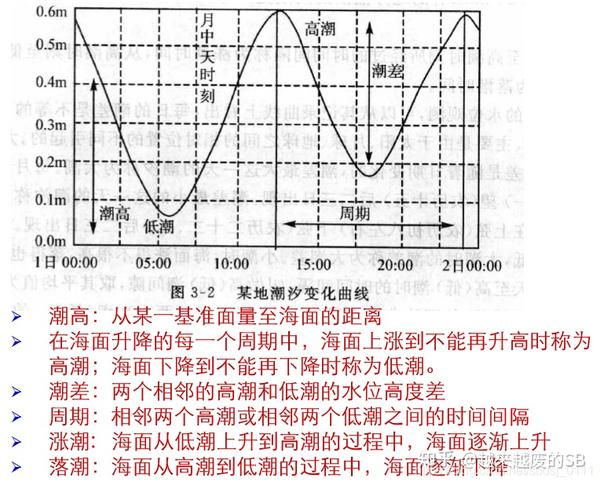
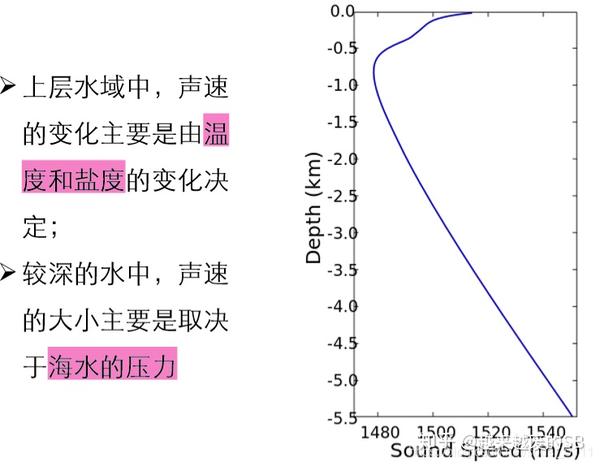
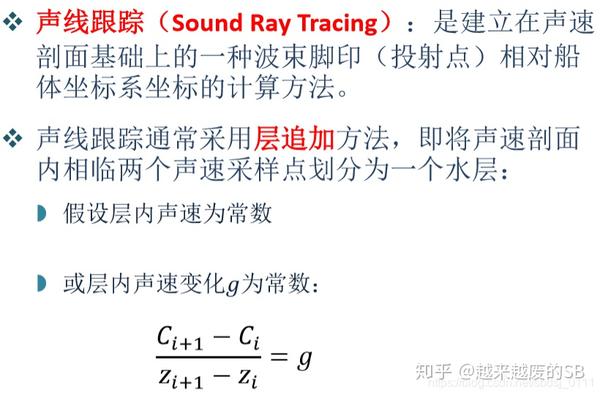
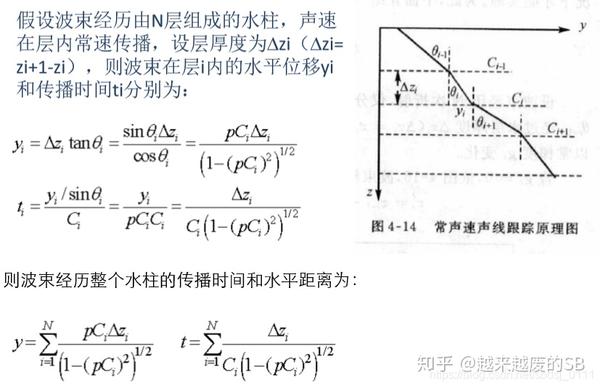
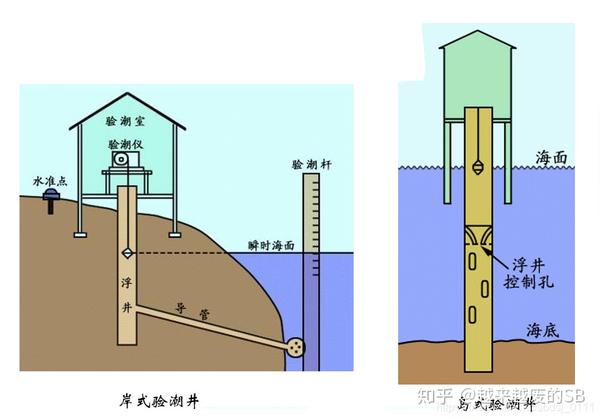
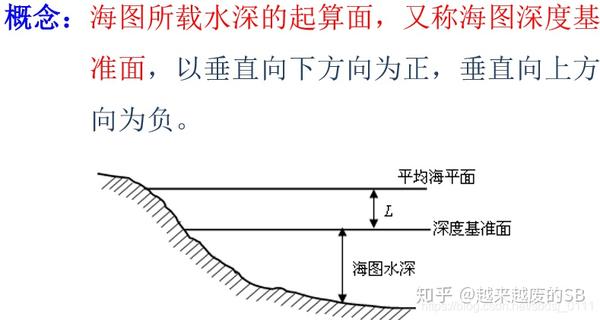
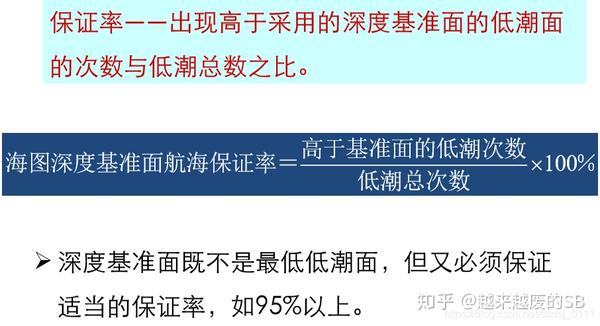
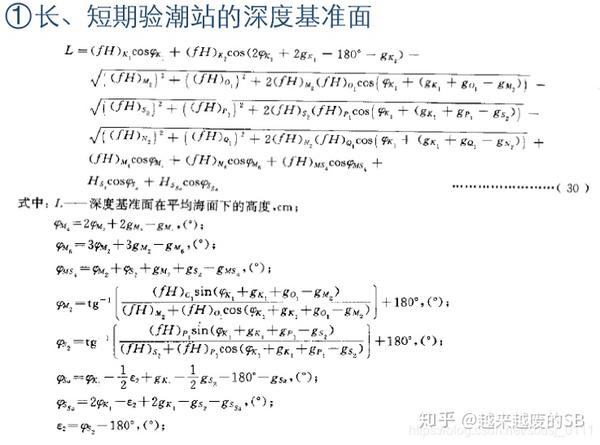
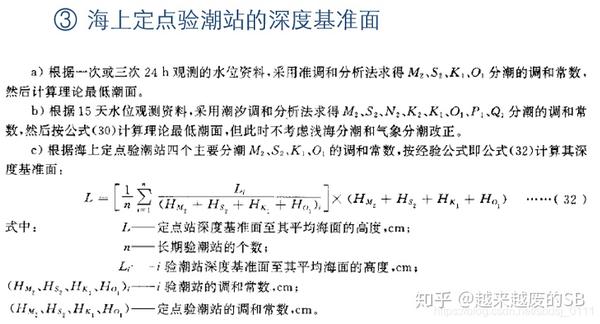
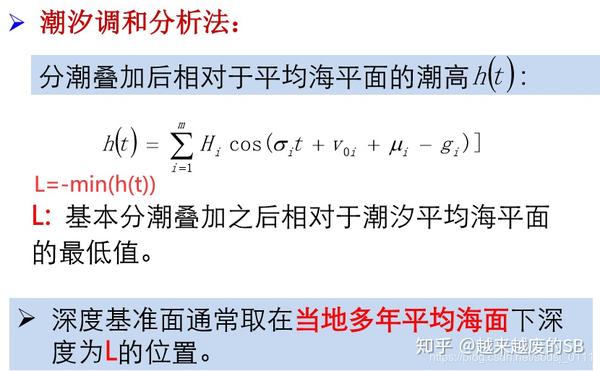
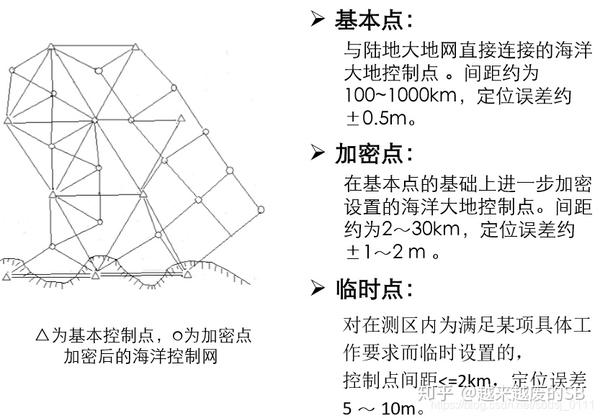
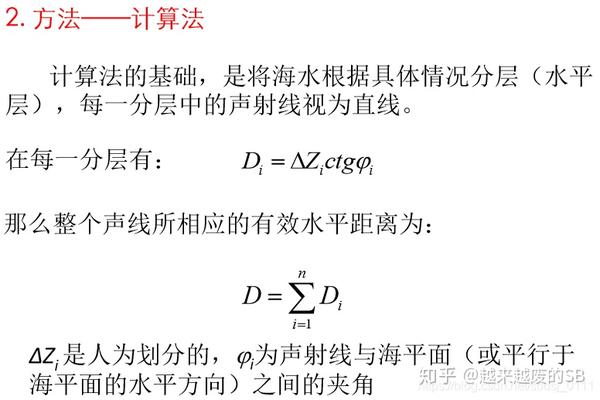
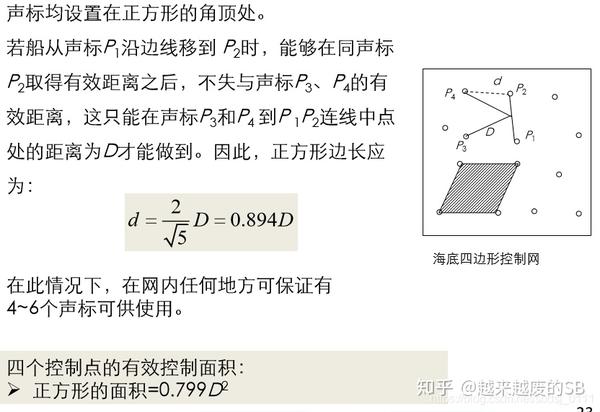
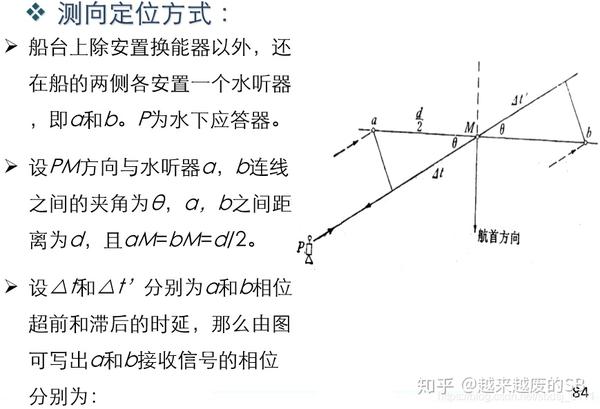
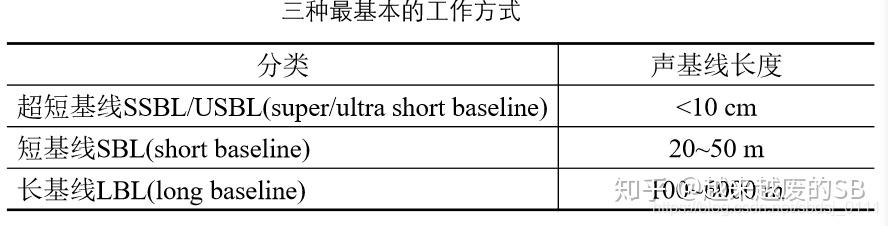
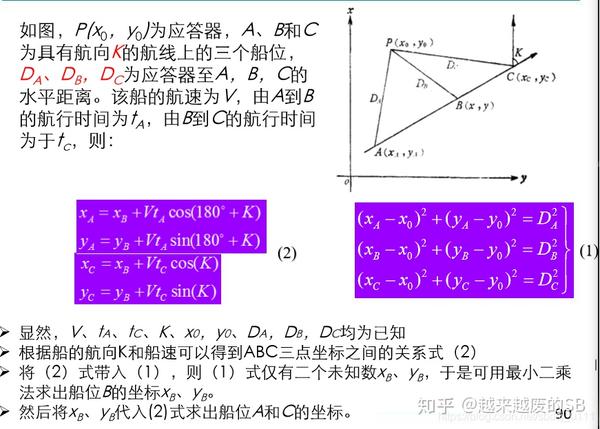
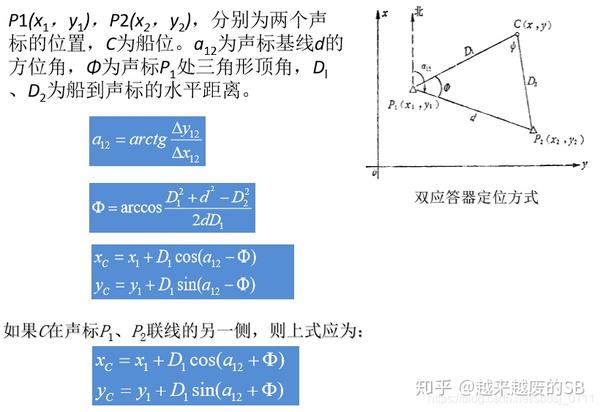
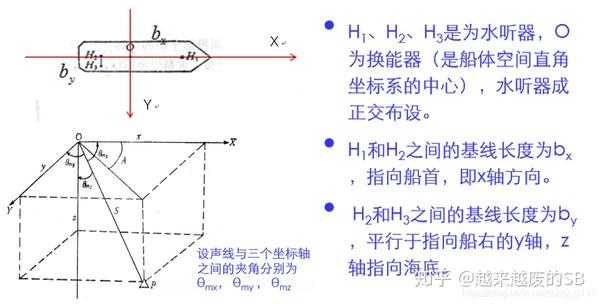
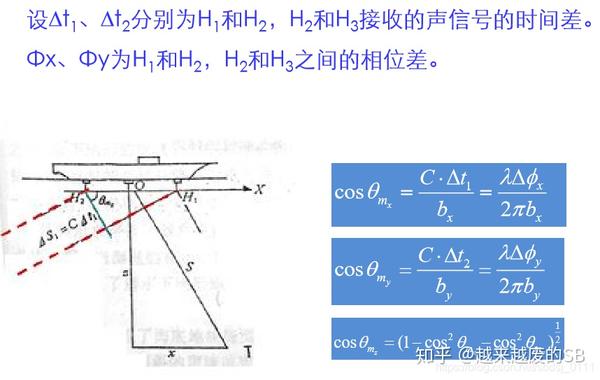
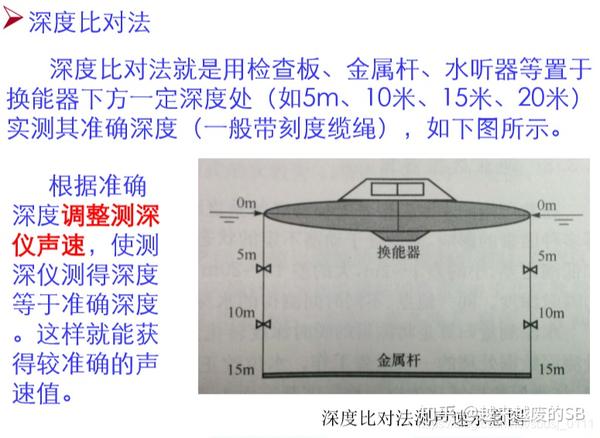
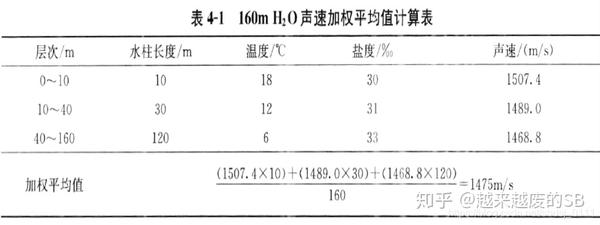
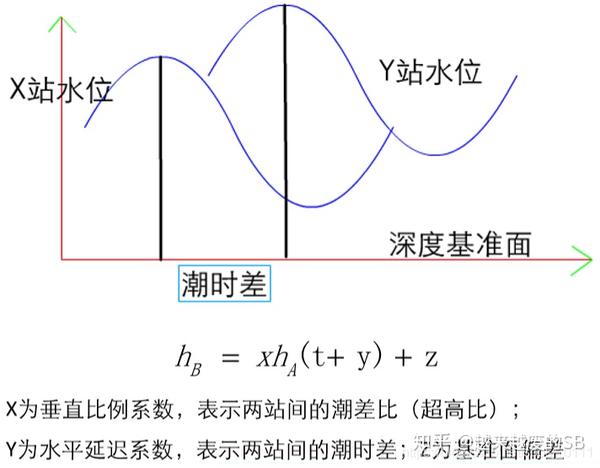
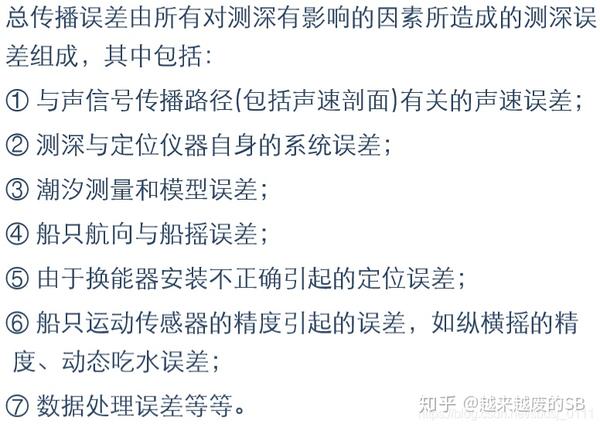
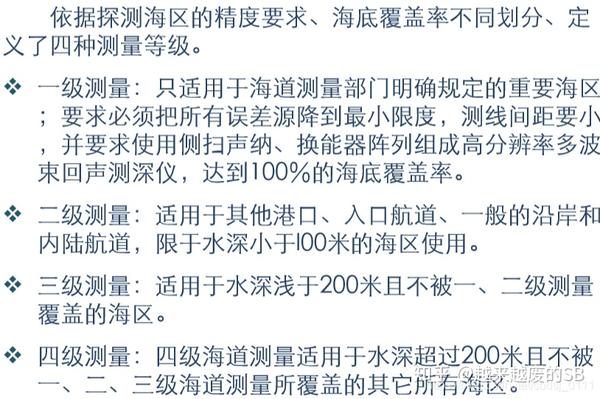
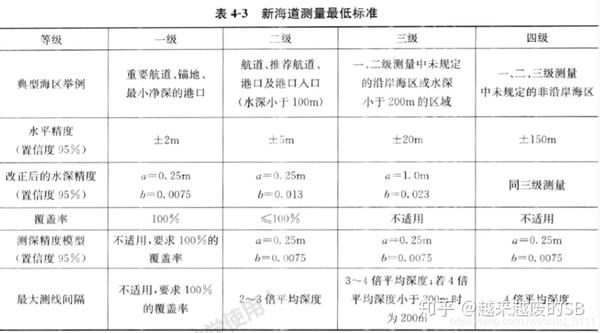
第一章 海洋测绘概述 1.1海洋研究点的历史人类对海洋的开发历程经历了:海洋知识逐步获取和积累的时期、海洋学的建立和发展时期、海洋科学在全世界范围内向深度和广度发展时期。 1、海洋知识逐步获取和累积的时期 主要开发的资源是海盐,开发范围在近岸浅水区域,生产手段为原始手工业。以及早期的航海活动,指南针的发展,海上探险和商业活动。 获取地方经度:出发地时刻与当地时刻的时差。 2、海洋学的建立和发展时期 “挑战者”号:1872-1876 测量水文及其季节变化,调查水深。 “流星”号:1925-1927 首次应用电子回声测深仪,观测精确,包含内容多。 3、海洋科学大发展时期 二战后,海洋大国提出了海洋研究和开发计划形成国际海洋间的合作研究。 1.2世界海洋新格局==内海==亦称内水,指领海基线以内的水域。国家对其享有完全的排他性主权。 ==领海==为沿海国的主权及于其陆地领土及其以外邻接的一带海域,在群岛国情形下则及于群岛水域以外邻接的一带海域。此项主权及于领海的上空及其海床和底土。 领海基线量起不超过十二海里的界限为止。 ==毗邻区==为一种毗连国家领海并在领海外一定宽度的、供沿海国行使关于海关、财政、卫生和移民等方面管制权的一个特定区域。 从领海基线量起不超过24海里。 ==领海基线==——陆地和海洋的分界线,也是测算领海、 毗连区、专属经济区和大陆架宽度的起点线 1、正常基线。是落潮时海水退到离海岸最远的潮位线。 2、直线基线。是指在大陆海岸和海岸外岛屿最外缘上 选定适当的点,用直线连接起来,形成一条沿着沿海国 的折线; 3、混合基线 大陆专属经济区为领海以外并邻接领海,介于领海与公海之间,具有特定法律制度的国家管辖水域。 大陆架指沿海国陆地向海的自然延伸部分,又称陆架、陆棚、大陆棚。 公海指沿海国内水、领海、专属经济区和群岛国的群岛水域以外不受任何国家主权管辖和支配的全部海域。 国际海底区域为国家管辖海域范围以外的海底、洋底及其底土。 1.3现代海洋测绘海洋测绘的涵义、地位及作用 海洋测绘是海洋测量和海图绘制的总称,其任务是对海洋及其邻近陆地和江河湖泊进行测量和调查,获取海洋基础地理信息,编制各种海图和航海资料,为航海、国防建设、海洋开发和海洋研究服务。包含测、绘、信息管理。 ==海洋测绘的特点== 垂直坐标和平面位置同步测定; 海底控制点的距离相隔较远; 动态测量,观测时间长,精度低; 声波,作为信号源; 测深并进行测深改正; 无法进行重复观测,须同步观测。 ==海洋测绘的内容== 海洋测量的意义 略 第二章 海洋的基础知识2.1海洋概述==海洋的含义==:海洋是地球表面包围大陆和岛屿的广大连续的含盐水域,是由作为海洋主体的海水水体、溶解和悬浮其中的物质、生活于其中的海洋生物、邻近海面上空的空气、围绕海洋周缘的海岸和海底等部分组成的同一体。人们通常称的海洋仅只作为海洋主体的广大连续水体。海洋中心部分称为“洋”,边缘部分称为“海”。==洋== 一般指的洋,亦称为大洋。洋是远离大陆、深邃而浩瀚的水域部分。约占海洋总面积的89%,深度一般在3000 m以上。大洋中海水的盐度温度等水文要素不受大陆的影响,年变化小,且比较稳定。大洋有独立的风,潮汐和洋流系统。地球上共有四大洋:即太平洋、大西洋、 印度洋和北冰洋;也有的把南大洋加上的。 各大洋的分界:太平洋:位于亚洲、大洋洲和美洲之间。北起白令海,南到南极的罗斯海,东至巴拿马,西至菲律宾的棉兰老岛。太平洋的西部,经马六甲海峡与印度海相通,东面由巴拿马运河与大西洋相连接 .太平洋是地球上最大和其中岛屿最多的大洋。 大西洋:位于欧洲、非洲和美洲之间。南临南极洲,北连北冰洋,并与太平洋和印度洋的水域相通。它是地球上的第二大洋。形状细长,呈“S”形,两头宽中间窄,在四大洋中南北长度最长,东西宽度最窄,在赤道附近宽度仅有1500 n mile左右。 印度洋:位于亚洲,非洲、大洋洲与南极洲之间,形状呈肩平形。东西长,南北短,大部分洋区在赤道附近,印度洋是一个热带洋。 北冰洋:位于欧,亚和北美大陆之间,基本上以北极为中心。北冰洋是地球上四大洋中面积最小,温度最低的寒带洋,终年被巨大的冰层所覆盖。 ==海== 海,一般人们把大洋四周的边缘部分称做海,海濒临大陆,面积比大洋小得多。深度一般在2000~3000m以下,有的只有数千米,海的面积占海洋总面积的11%。海中的水温、盐度等水文要素,受大陆和季节的影响,变化较大,水色混浊、透明度小,潮汐和海流均受大洋的支配,没有自己独立的系统。 海包括边缘海、陆间海、内陆海。介于大陆之间的海为陆间海,例如欧、亚、非大陆之间的地中海;深人大陆内部的海称为内陆海,如我国的渤海。陆间海和内陆海,均为地中海,其水文状况主要受陆地的影响。另外,既是大洋的边缘,而与大洋之间又有半岛或岛屿相隔的称为边缘海,例如我国的黄海、东海和南海等。 中国近海情况 P11 ==海湾== 海湾是指洋或海延伸进入大陆部分的水域。其深度逐渐减小。海湾中海水的性质与其相近的洋或海中水的状况相似。由于海湾不断变窄、变浅,因此容易发生最大的潮潮汐。 ==海峡== 海峡是指海洋中相邻海区之间宽度较窄的水道。海峡地区海洋状况的最大特点是潮流速度很大。海峡有深有钱、有宽有窄,它们是连接洋与洋,洋与海海与海的咽喉。 ==海岛== 海岛是对海洋中露出水面、大小不等的陆地的统称;屿是比岛更小的海洋陆块;“礁”海平面和大陆架变化时,月球引力导致地球潮汐淹没的岛。岛与陆地的分界为格陵兰岛,大陆和它附近岛屿的总称为大洲或洲。 海岸、海岸带和海岸线是3个相关的概念。 海岸笼统地讲就是陆地与海洋相互作用相互交界的地带。海岸可以分为海、陆之间现今正在相互作用着的现代海岸和过去曾经相互作用过的古代海岸两种。其实,海岸的概念可以包括在海岸带这一概念之中。 海岸带是海陆交互的地带,其外界应在15~ 20 m等深浅一带,这里既是波浪、潮流对海底作用有明显影响的范范围,也也是人们活动频繁的区域;它的内界,海岸部分为特大潮汐(包括风暴潮)影响的范围。河口部分则为盐水人侵的上界海岸线是近似于多年平均大潮高潮的痕迹所形成的水陆分界线。 2.2==海洋地形==2.2.1海面地形海面由于受潮力、风、流、海洋水文和气象,重力,地球自转等因素的影响而处于不停的运动和变化之中。沿用陆地地形的概念,把海面相对于大地水准面的起伏称为海面地形。 2.2.2海岸地形海岸:是陆地与海洋相互作用、相互交界的地带。 海岸线: 1)在地图上,人们为了明显起见,把海洋和陆地用一条界线截然分开,并亦把这条海水和陆地相交的界线称之为“海岸线”。 2)近似于平均大潮高潮时的痕迹所形成的水陆分界线。(海道测量规范) 3)海岸线可根据海岸植物的边线、土壤、植物的颜色、湿度、硬度以及流木、水草、贝壳等冲积物来确定。 海岸带: 1)海陆交互的地带,其外界应在15-20米等深浅一带,这里既是波浪、潮流对海底作用有明显影响的范围,也是人们活动频繁的区域。 2)海岸带的内界,海岸部分为特大潮汐(包括风暴潮)影响的范围。河口部分则为盐水入侵的上界 。 2.2.3海底地形据海底地形的基本特征,一般把海底地形分为: 大陆边缘、大洋盆地、大洋中脊。 ==大陆边缘== 大陆边缘是大陆与海洋之间的边缘地带也是过渡带。大陆边缘通常由大陆架、大陆坡、大陆隆(基)及海沟等组成。约占海洋总面积的22%。 大陆架是大陆周围被海水淹没的浅水地带,是大陆向海洋底的自然延伸,其范围是从低潮线起以极其平缓的坡度延伸到坡度突然变大的地方(即陆架外缘)为止。 大陆坡是大陆架外缘陡倾的全球性巨大斜坡,其下限为坡度突然变小的地方。 大陆隆是从大陆坡下界向大洋底缓慢倾斜的地带,又称大陆基或大陆裙。 海沟是大陆边缘底部狭长的海底陷落带,深度通常大于6000m,多数海沟分布在太平洋四周。岛弧是呈弧形排列的群岛。 弧形凸面朝向海洋,岛弧外侧常有深的海沟,是分割大洋盆地和边缘盆地的重要构造地貌单元。板块学说认为,岛弧是大洋板块向大陆板块俯冲时,大陆板块受挤上拱,隆起而成,岛弧属构造活动地区,有强烈的地震和火山活动。 ==大洋盆地== 大洋盆地:海洋的主体,指大洋中脊坡麓与大陆边缘之间的广阔洋底; 大洋盆地的主要部分是水深4000~5000m的开阔水域,称深海盆地; 深海盆地中最平坦的地区称深海平原; 占海洋总面积的45%。 ==大洋中脊== 大洋中脊:屹立于大洋底部的巨大山脉; 相对高度3000米以上,连绵数万公里; 占海洋面积33%。 海洋地形的测量方法: 第三章 海洋水文特性3.1海水的物理特性3.1.1海水温度及其测量海洋水温及其分布 海洋热量的收入,主要来自太阳辐射的热量;海水热量的支出,主要是海水的蒸发所消耗的热量。温度=收入-支出 表层水温: 海洋表层水温的基本分布情况:随着纬度增高,温度不规则地逐渐下降;等温线大体呈带状分布,在寒暖流交汇处,等温线密集,温度梯度最大。 全球海洋表面年平均水温为17.4℃,比全球年 平均气温14.3℃高出3.1℃。太阳辐射入海的光能被表层海水吸收,因此表层海水温度高于海洋内部。海水最高温度出现的位置,平均在7°N左右。 深层水温: 在1000米深处的水温约为4 ℃~5 ℃; 在2000米深处的水温约为2 ℃~3 ℃; 全球海洋平均温度为3.8℃; 4000m温度分布均匀,大洋温差不超过3°; 南极底层水性质均匀,约0°左右。 ==海水温度观测方法== 表层水温观测方法: 1. 直接测量方法常用仪器: • 海水表面温度计 • 电测表面温度计 • 其他的测温仪器 2. 用水桶提取海水,再用精密温度计测定水温。 3. 卫星上通常利用红外辐射温度计测定海洋水温。 4. 在海洋浮标上一般装有自记测温仪器,记录所在位置的温度 。 深层水温观测方法: 主要采用的仪器:深水温度计;颠倒温度计;温盐深自记仪器 ;投弃式温深仪等。 实际测量中,温度是以国际温标为依据,国际符号为 T(热力学温度)或t (摄氏温度℃);一般以摄氏温度表示。 海水盐度、密度相关内容略过。 小结:海水温度、盐度、密度分布 3.2海洋的活动可见的海洋现象: 由于地球自转、季风引起的大规模海洋活动——海流 由于风力引起的海洋活动——波浪
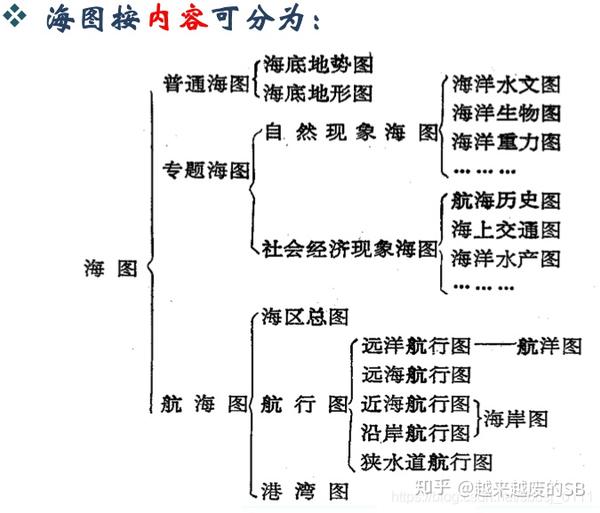
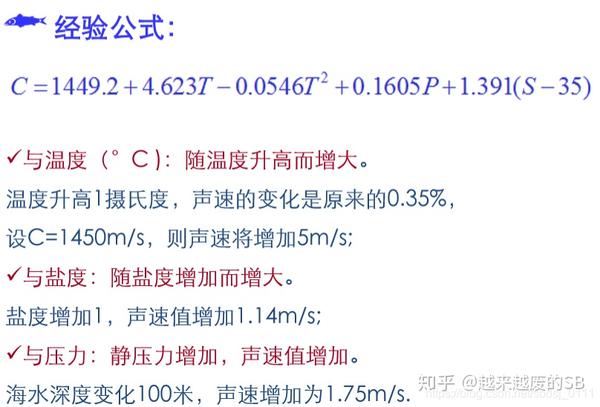
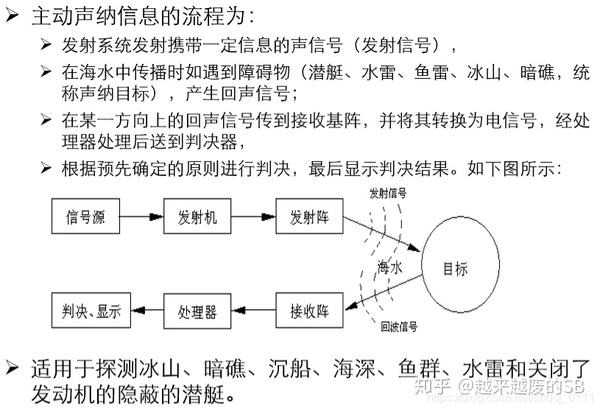
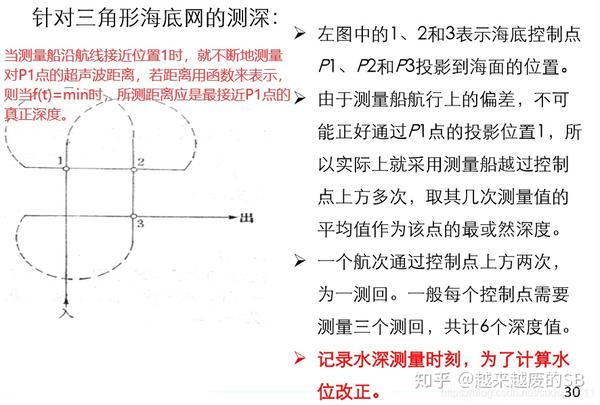
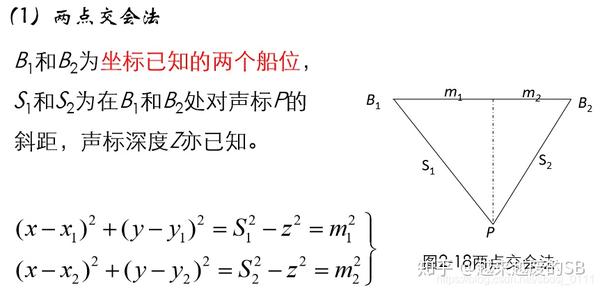
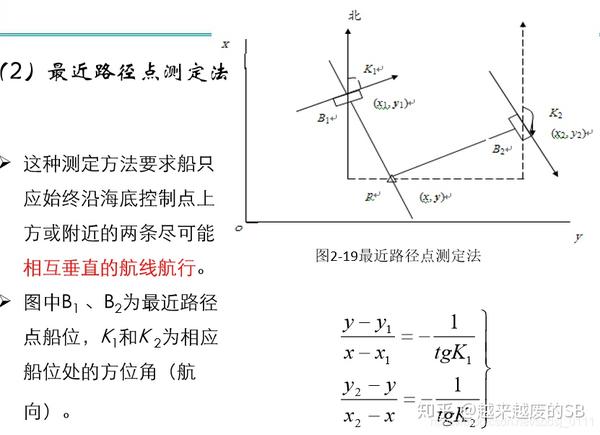
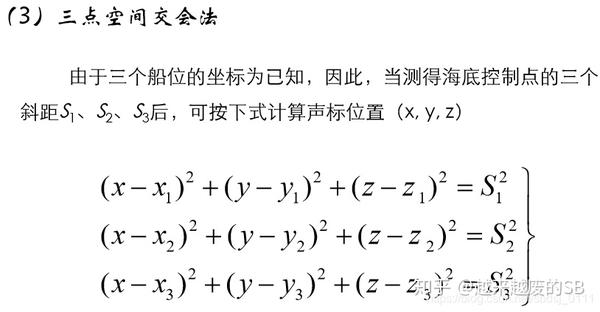
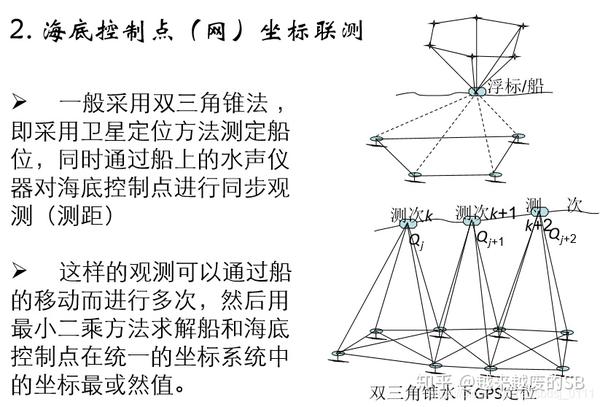
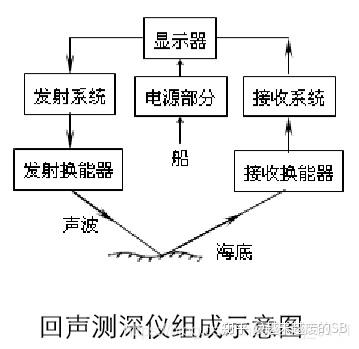
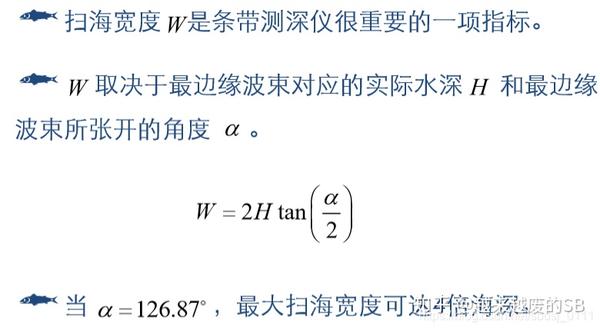
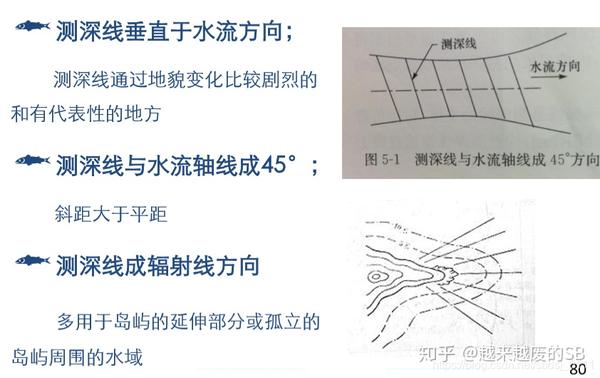
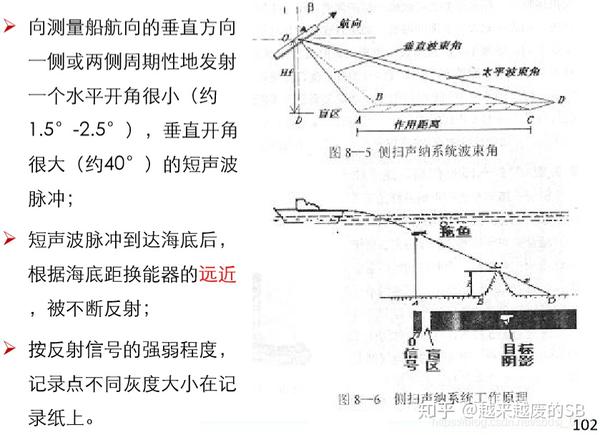
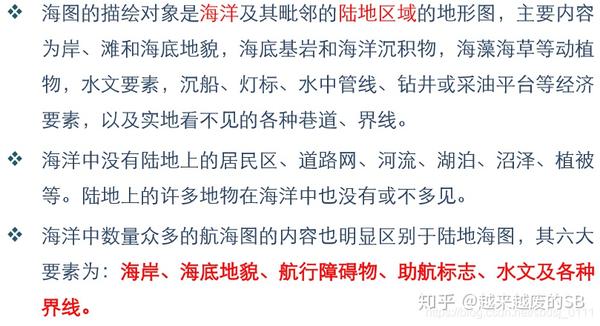
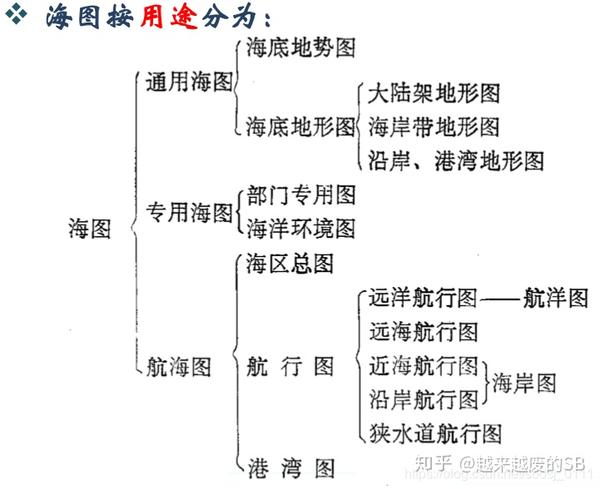
4 Z6 f, y7 d& k8 T由于地球和太阳系天体的作用引起的海洋活动——潮汐 由于地质活动引起的海洋活动——海啸 海流 海流是海洋中的海水以相对稳定的速度,沿一定方向做大规模的非周期性运动。 对海面的影响:大地水准面和海面地形与洋流有关。 海浪 海浪是发生在海洋中的一种波动现象。 分为:风浪、涌浪、近岸浪 风浪指的是在风的直接作用下产生的水面波动。风浪中同时出现许多高低长短不等的波,波面较陡,波峰附近有浪花或大片泡沫。此起彼伏,瞬息万变。初看无规律可循。波面粗糙,波峰线也短。 涌浪指的是风停后或风速风向突变区域内存留下来的波浪和传出风区的波浪。具有较规则的外形,排列整齐,波面较平滑、波峰线长。 近岸浪指的是由外海的风浪或涌浪传到海岸附近,受地形作用而改变波动性质的海浪。随着海水变浅,波动传播速度变小,致使波峰线弯折而渐渐地和等深线平行。 对海上测量的影响:海上测量成果必须努力减弱和消除波浪的影响。采用波浪步长器和姿态传感器削弱。波浪使船只产生横摇、纵摇、升沉。 ==潮汐== ①海洋潮汐——海水受日、月引潮力作用而产生的海洋水体的周期性上升下降运动。通常一天早晚两次涨落,故称为潮汐。 ②海洋潮流——伴随海面周期性的升降运动而产生的海水周期性水平方向流动。 ==潮汐曲线== 大潮:潮差最大这 一天的潮汐称为大潮。 小潮:潮差最小这 一天的潮汐称为小潮。 潮汐的影响深度测量结果是瞬时海面到 海底的深度。海面存在潮起 潮落的影响,为了统一,必 须将测量结果化算到统一的 深度基准面上。海上测量成果,必须努力减弱和消除潮汐的影响。 海啸 海啸——由海底地震,火山爆发和水下滑坡、塌陷所激发的,其波长可达几百公里的海洋巨波。 第四章 海洋声速及声线跟踪4.1光波、电磁波在海水中的传播4.1.1光波在海水中的传播水对光线的传播特点 光线在水中的衰减比空气大千倍以上; 水越混浊衰减越大; 随着深度的增加,按波长长短顺序逐个吸收,一般来说长波先被吸收,短波后被吸收; 蓝光的散射和吸收大致相等,其他的以吸收为主; 4.1.2电磁波在海水中的传播电磁波在海水中几乎不能通过。液态的海水导电率极低,几乎使一切波长的电磁波受阻而无法穿透。 兆赫以上的电磁波在海水中的穿透深度小于1m,海水对这种电磁波就成为很强的屏蔽层。 频率低于10周/小时的电磁波,海水中的穿透深度可达5000米; 在海水中接收来自空间的电磁波进行通讯或海底测深,以低频而波长较长的电磁波较为有利,而高频电磁波无实用价值。 小结:光波、电磁波的应用 1)使用一千赫的低频电波,用很大功率的长波发射电台,也只能和几十米深处的潜艇通信; 2)即使在最清澈的海水中,人们最多也只能看到十几米到几十米以内的东西。 光波和各种电磁波在海水中被吸收得很厉害,衰减很快,只能传播很短的距离; 3)在研究和探测大气和海洋表层界面的物理和化学特性中,海洋光学技术,电子技术获得了广泛应用。特别是海洋遥感技术和设备发挥了重要作用。 ①基于可见光波段的航空或宇航照相系统; ②基于红外波段的多光谱扫描系统和红外探测系统; ③基于厘米波段的微波系统 ④基于十米波段的超视距雷达和合成孔径雷达探测系统 4)光学、电磁波技术在海洋定位测量中的重要应用: ①传统的光学定位技术 ②近岸地基无线电定位系统 ③空基无线电定位系统 4.2==海洋声学==4.2.1声波在海水中的衰减吸收系数:单位距离能量衰减的程度 4.2.2声速测定方法 直接法:利用声速剖面仪直接测定声速。 间接法:根据测得的温度、盐度和压力,用声速经验公式计算海水中的声速。 ==声速与温度、盐度、压力之间的函数及各变量影响方式== ==声速与水深关系== 4.2.3声波的反射和折射海面反射 声波由海水射向海面时,在海水与空气界面上所产生的反射,称为海面反射。海面反射与海面的不平整程度、声波频率和入射方向有关,海面平静时,射向海面的声能几乎全部反射。 海底反射 声波由海水射向海底时,在海水与海底的界面上所产生的反射,称为海底反射。 海底反射的损耗远大于海面反射。 ==声波的折射== ==折射现象 == ==海水是非均匀介质==,是导致波束声线弯曲和传播速度发生改变的根本原因; 折射后的声线是向声速==减小==的方向弯曲; 声线的弯曲程度和方向与==声速在垂直方向的变化==相互联系,声速变化越大,弯曲越显著; 声波的传播速度在温水区要比冷水区快,且向==冷水区==(即声速较低的水区)弯曲; 正常情况下,声线弯曲成==圆弧状==。 4.2.4水下(海洋)声道水下声道:当声波在海洋中传播时,若有一部分声能在海中某一水层内而不溢出该水层,此水层称为水下声道。 声道轴:声速分布在极小值深度处的水平线称为声道轴。 声波在水下声道中的传播 水下声道的深度一般在900~1300米左右; 声波在水下声道中的传播距离可达几千公里,低频声波甚至能传播上万公里远; 在水下通讯,营救,海啸预报等方面有重要意义。 4.2.5海底地层中声波传播进行海底地质勘探时,通过测量海底各地层中的声速,可判断出海底的地质构造。 4.2.6海洋噪声4.3==声呐技术==相关概念 声呐 SONAR 水声技术——研究和开发海洋所用的声学技术叫做水声技术; 声纳系统——利用水下声波的传播特性来进行水中目标探测,识别,定位,导航和通讯的设备系统。 换能器 换能器——用来在水中进行声电或电声转换的器件。可分为发射换能器和接收换能器 发射换能器——将电信号转换成声信号向水中发射的称“发射换能器”; 接收换能器——将接收到的水声信号转换成电信号的称“接收换能器”,又称“水听器”。本身不发射声信号,只是接收声信号。 应答器 应答器——既能接收声信号,还能发射不同于所接收信号频率的应答信号,是水声定位系统的主要水下设备,也能作为海底控制点的照准标志,即水声声标。 4.3.1声纳系统声呐系统按照工作方式分为: 主动声呐:是指声纳主动发射声波“照射”目标,而后接收水中目标反射的回波以测定目标的参数。 被动声呐:是指声纳被动接收舰船等水中目标产生的辐射噪声和水声设备发射的信号,以测定目标的方位。 4.3.1.1主动式声呐工作流程4.3.1.2被动式声呐工作流程4.4声线跟踪4.4.1基于层内常声速下的声线跟踪4.4.2基于层内常梯度下的声线跟踪第五章 潮汐观测和深度基准5.1==潮汐==5.1.1潮汐的成因引潮力——月球、 太阳等天体对地球上单位质量物体的引力和该单位质量物体所受惯性离心力的合力称为引潮力。 地球上某处引潮力的影响因素: 与天体的质量成正比; 与地球到天体中心间距离的三次方成反比; 与天体在该处的天顶距有关。 太阳的影响 5.1.2潮汐的类型半日潮: 一个太阴日内有两次高潮和两次低潮; 相邻的高潮或相邻的低潮的潮高大体相等; 涨潮过程和落潮过程的时间也几乎相等 (6小时12.5分) 我国渤海、东海、黄海的多数地点为半日潮型,如大沽、青岛、厦门等 全日潮: 一个太阴日内出现一个高潮和一个低潮; 在半个月中有连续1/2以上天数是日潮,而在其余日子为半日潮的也叫全日潮。 如南海汕头、渤海秦皇岛等。南海的北部湾是世界上典型的全日潮海区 混合潮 界于半日潮与全日潮之间。 对于具有半日潮的特性,但在一个太阴日内相邻的高潮(或低潮)的高度相差很大,涨潮时间和落潮时间也不等的潮汐又叫不正规半日潮; 而在半个月中,日潮的天数不超过7天,其余天数为不正规半日潮的又叫不正规日潮。 如榆林港,十五天出现全日潮,其余日子为不规则的半日潮,潮差较大 5.2潮汐观测潮汐观测通常称为水位观测,又称验潮,即观测潮位涨落,即把潮高记录下来。 潮汐观测方法:水尺验潮、浮子验潮仪、压力式验潮仪、超声波验潮计验潮、GPS验潮…… 5.2.1水尺验潮特点:人工目测记录每小时的潮位高度;适合于短期验潮站。 水尺设置: 直立水尺 倾斜水尺:在设置直立水尺有困难的地区(如波浪冲击力很大的岸边)可设置倾斜水尺 短桩式水尺:适于有严重流冰和漂浮物及有频繁航运的地方 悬臂式水尺:适于水很深、石质底、岸壁陡峭的地区。江河封冻无法设立木桩式水尺时,也采用此法 一旦水尺被撞倒,所观测的潮位资料及由此计算的平均海面、深度基准面便没有依据。为解决此问题,需在岸上设立==固定水准点==( 固定在岩石或水泥桩上),并求出==水尺零点和岸上水准点之间相对高度==。 固定水准点设在测站附近,设置地点要求坚实稳定,潮水不能淹没,不要设在离铁路、公路太近和土质松软的地方,以及不坚固的建筑物上,以免损坏。 5.2.2浮子式验潮仪测井消除海面波动对浮筒的影响 5.2.3压力式验潮仪5.2.4声学式验潮仪①探头安置在空气中的声学式验潮仪 在海面以上固定位置安放一声学发射接收探头,探头定时垂直向下发射超声脉冲,声波通过空气到达海面并经海面反射返回到声学探头,通过检测海面回波,得到海面随时间的变化。 ②采用类似于测深仪的原理 选一块平坦的海区,将声探头放置于海面固定载体上,一般为船或固定漂浮物,定时向海底发射声波,通过检测海底回波以检测载体所在位置的水深。 5.2.5GPS验潮==通过大地高传递高程== 5.3潮位的数字模型潮汐调和分析——根据最小二乘或波谱分析等原理,由实际潮汐观测数据,计算各分潮的调和常数的过程; ==验潮的目的==:确定各站的==多年平均海面,深度基准面、各分潮的调和系数==;获得测深时刻所测深度的==水位改正数==; 5.4平均海平面平均海平面——某一海域一定时期内海水面的平均值。 日平均海面——消除小时的潮汐影响; 月平均海面——消除每天的海洋潮汐变化; 年平均海面——消除气象因素的影响; 长期的平均海面——消除长周期的潮汐影响; 多年平均海面——一般采用长期验潮站19年(月亮升交点周期为18.6年)的验潮观测数据球平均海面,有较好的稳定 性,也称为似静(稳)态平均海面; 5.5深度基准5.5.1深度基准面的概念海洋水深测量所获得的水深值,是从测量时的海面(即瞬时海水面 )起算的。由于受潮汐、海浪和海流等的影响,瞬时海面的位置会随时间发生变化,因此,同一测深点在不同时间测得的瞬时深度值是不一样的。必须规定一个固定的水面作为深度参考面,把不同时间测得的深度都换算到这一参考水面上,这一参考水面称为深度基准面。就大地测量而言,采用平均海面 作为水深测量的基准面,可以使水深与陆地高程得以统一。但在海图编制中,常采用一个低于平均海面的参考面作为深度基准面。 5.5.2深度基准面的选取原则求算深度基准面的原则: 1. 既要保证舰船航行安全; 2. 又要考虑航道利用率。 5.5.3我国深度基准面理论深度基准面(前苏联,弗拉基米尔,依据潮汐调和常数计算出的理论最低潮面)--->理论最低潮面(更名,并增加2个长周期分潮进行长周期改正,因此计算理论最低潮面的分潮从11个增加到13个) 5.5.4理论最低潮面的特点①离散、不连续 不同的验潮站计算的L值是不同的;同一个验潮站,采用不同时段的验潮数据计算出的L值也是不同的 ②符合海图使用习惯,沿用历史已久,计算模型也很成熟,除了可以作为海洋、江河水域中深度的起算基准外,对当地的潮汐性质的分析研究也可提供帮助。 5.6深度基准面的具体确定深度基准面的具体确定需要确定平均海平面和L。 5.6.1验潮站验潮站布设有一定的密度要求: 相邻验潮站之间: 最大潮差不大于1m; 最大潮时差不大于2h; 潮汐性质基本相同。 美国NOAA(<10km),英国(<15km) 5.6.1.1验潮站的类型5.6.1.2==短期验潮站平均海平面的确定==③线性关系最小二乘拟合法(P116) 5.6.1.3深度基准面的确定5.6.1.4L的确定第六章 海洋大地控制网6.1概述6,2海面控制网海面控制网主要包括==以固定浮标为控制点的控制网、海岸控制网、岛屿控制网以及岛屿—陆地控制网。== 海面大地测量控制网布设特点: 采用的几何图形与陆上大地网基本相同,如三角形、 四边形、中点多边形。 采取逐级控制的方法; 按片形或锁形两种方式布设; 6.3海底控制点的照准标志和作用距离海底控制点的结构,通常由固设于海底的中心标石和水声照准标志两部份组成。 水声照准标志分主动式和被动式两种。 6.3.1主动式水声照准标志所谓主动式水声照准标志,实际上是一种==水声声标== 它能主动发射出强度足以保证测量船上的水声设备能在其有效作用距离内接收到该信号; 或者当接收到船台发射出的询问声信号后,能转发不同频率的应答声信号被船台接收。 具有这样两种功能的水声声标,我们称为==主动式水声照准标志==。 海洋定位中常采用的==应答器==就被普遍用作海底控制点的主动式照准标志。 作为海底控制点照准标志的水声应答器,通常由换能器、电子系统(包括电源)、锚以及浮标等组成。 6.3.2被动式水声照准标志被动式照准标志:以自身表面反射来自船上水声设备所发射的声信号再被船台接收; 主要技术要求:反射信号的能力,即==目标强度== 提高被动式照准标志的目标强度,应考虑下列因素: 1. 入射声信号所具有的声功率; 2. 入射声信号的方向性,当位于入射声波波阵面的法线方向时,显然它具有最大的声能; 3. 被动式水声照准标志的材料结构和形状。 6.3.3水声声标的有效距离定义:水声声标的有效距离,即声信号的最大传播距离。这里的有效距离,指的是==有效水平距离==。 影响水声声标有效距离的因素: (1)声信号的发射强度和频率; (2)声信号传播路径中噪声的掩盖作用; (3)声信号传播过程中的衰减; (4)声射线的折射特性。 声标信号频率选择 (1)高于10kHz的声信号的衰减作用较大; (2)低于1kHz的频率声信号的衰减很小可以忽略,但是低频信号要求发射技术设备非常复杂,开支较大; (3)通常选择8-15kHz。作用距离:10-18km 声标倾斜的影响 声标所在海底地形对声信号的有效传播距离也有一定的影响 。如当声标置于倾斜的地段时,那么上坡方向,有效距离将减小,而下坡方向,有效距离将增大。如图所示。图中P为声标,B和B1,为船位,O和O1,分别为下坡和上坡方向声射线曲率中心,d和d1为相应的有效水平距离。显然,d大于d1。所以,要求水声声标尽可能布设在海底地形平坦的地段。 6.3.4水声声标有效距离的计算6.4海底控制点(网)的几何图形当利用坐标已知的海底控制点来确定测量船位时,须满足二个条件: 1.测量船必须位于作为海底控制点的水声声标的有效范围之内; 2.需要三个这样的控制点实施定位。 因此,就要求海底控制点应以规则的几何图形布设。一般有正方形和等边三角形。 6.4.1以等边三角形构成的海底控制网6.4.2以正方形构成的海底控制网对于均匀覆盖的同一面积来说,三角形网所需设置的声标数目比正方形的要少。一般以等边三角形布设海底控制网点 6.5海底控制点(网)坐标的测定海底控制点(网)坐标的测定一般分两步进行: (一)第一步是海底控制点的定标; (二)第二步是海底控制点坐标的测定。 6.5.1海底控制点的定标定义:当水声声标按照布网设计方案投放到海底后,要对控制点的==深度,相互间距离==以及==方位==进行测定,这项工作称为海底控制点的定标。 作用:验证是否符合布网方案要求;得出控制点之间的相对位置(或者说控制点在局部坐标系中的位置)。 6.5.1.1海底控制点深度的测定海底控制点的深度,指的是声标在==平均海面==下的深度。深度测定一般采用回声测深仪。 在海上,由于考虑的因素比较多,使用国家高程基准的情形要复杂得多。例如,在近岸和大陆架海区进行海底地形测量,通常需采用与陆地统一的高程基准。而在其他情况下均采用所谓深度基准面。深度基准面即海图所载水深的起算面,又称海图基准面。 通常采用所谓三叶法来测定海底控制点的深度。实际上“三叶法”,它指的是测量船在进行深度测定时的航行路线,如图所示船只按箭头指示方向航行。 6.5.1.2海底控制点间距离的测定海底控制点间距离指水平距离。 6.5.1.3海底控制点(网)方位(角)的测定6.5.2海底控制点坐标的测定6.5.2.1单个海底控制点坐标的测定6.5.2.2海底控制点(网)坐标的联测6.6==要点==1.海洋大地测量的定义:海洋大地测量控制网是陆上大地控制网向海域的扩展。 2.海洋大地控制网的组成:海洋大地测量控制网主要由海底控制点、海面控制点(如固定浮标)以及海岸或岛屿上的大地控制点相连而组成。 3.海底控制网的网形结构:正三角形,正方形。 4.海底控制点的构成,海底照准标志的类型:海底控制点的结构,通常由固设于海底的中心标石和水声照准标志两部分组成。水声照准标志分为主动式和被动式两种。 5.简述海底控制点定标的作用及内容:海底控制点定标的作用是验证是否符合布网方案要求,得出控制点之间的相对位置(或者说控制点在局部坐标系中的位置);内容包括海底控制点深度的测定、海底控制点间距离的测量、海底控制点(网)方位的测定。(参照测量学的测量要素:高程、距离、角度) 6.海底控制点坐标测定的方法:两点交会法、最近路径点测定法、三点空间交会法。 第七章 海洋定位测量7.1位置线在航海定位中,观测值相等的点的轨迹叫做位置线。 7.2海洋定位测量常用的方法1)天文定位 2)光学定位:经纬仪、全站仪 3)地基无线电定位:双曲线方式定位仪、圆圆定位仪器 4)空基无线电定位:北斗、GPS、GLONASS、GALILEO 5)水声定位:水下声标和接收基阵组成的水声定位系统 7.2.1天文定位天文定位是一套独立的定位系统,借助于天文观测,确定海洋上船只的航向以及经纬度,从而实现导航和定位。通常采用的方法有: ① 观测太阳法确定船只纬度 ② 天文船位线确定天文经纬度 ③ 观测北极星定向法 7.2.2光学定位只能用于沿岸和港口测量,随着无线电定位的进一步完善,通常只作为辅助方法,而不是主要方法。 以交会法为主,包括前方交会法(测角)、后方交会(测距,精度低,已渐被淘汰)、极坐标法(光电测距)等。 7.2.3地基无线电定位概念——在陆地上设立若干个无线电发射台(岸台),通过测量无线电波传播的有关参数(如信号振幅、相位、传播时间等),通过计算来确定运动的船相对于岸台的位置。 地基无线电导航分类 按有效作用距离分:近程/中程/远程/超远程系统; 按所测电信号参量分:振幅/频率/相位/脉冲/混合系统; 按所测几何参量分:测角/测距/测距差/测距和系统; 按工作方式分:有源/无源系统。 7.2.4空基无线电定位GNSS测量原理部分略过,或可查看本人其他博客。 GNSS海上定位应用 差分定位技术:沿海无线电指向标/差分全球定位系统(RBN/DGPS);近海全球导航卫星系统连续运行参考站网 绝对定位:单点定位;精密单点定位(广域实时精密定位系统 ;OmniSTAR ;Seastar……) 7.2.5==声学定位==声学定位用于水下或水面运载工具的定位系统。 系统中的水声设备: 换能器:是一种声电转换器,能根据需要使声振荡和电振荡相互转换,为发射(或接收)信号服务,起着水声天线的作用。 水听器:本身不发射声信号,只是接收声信号。 通过换能器将接收的声信号转变成电信号,输人船台或岸台的接收机中。 应答器:既能接收声信号,而且还能发射不同于所接收声信号频率的应答信号,是水声定位系统的主要水下设备,它也能作为海底控制点的照准标志(即水声声标)。 7.2.5.1==水声定位的基本原理==定位方式:测距定位方式、测向定位方式 7.2.5.2==水声定位系统==7.2.5.2.1长基线定位系统长基线系统组成: 安装在船只上或水下机器人上的收发器; 一系列已知位置的固定在海底上的应答器,这些应答器之间的距离构成基线。 由于基线长度在百米到几千米之间,相对短基线和超短基线,该系统被称为长基线声学定位系统。 定位原理: 一个应答器定位 双应答器定位 ==三个应答器定位== 长基线定位系统的特点 缺点:布设数量巨大的声基阵需要较长的布设和回收时间 ,并且需要对这些海底声基阵进行详细的校准测量。 长基线定位系统的设备比较昂贵。 优点:换能器比较小,易于安装与拆卸;定位精度较高。 7.2.5.2.2短基线定位系统短基线系统组成 船上设备除控制、显示设备外,还于船底安置一个水听器基阵。水听器之间的距离一般超过10m,相互关系精确测定,并组成声基阵坐标系。 水下部分仅需要 一个水声应答器。 短基线定位按定位方式可分为: 测向方式定位,称为方位-方位法。 测向-测距混合方式定位,称为方位-距离法。 方位-方位法 方位-距离法 短基线的优缺点 缺点: 三个水听器靠的很近,几何图形差,距离越远,定位误差越大; 测量目标的绝对位置精度依赖于外围设备; 深水测量要达到较高的精度,基线长度一般需要大于40m。 优点: 价格低廉,系统操作简单。 7.2.5.2.3超短基线定位系统特点: 船底的水听器阵列以彼此很短的距离(小于半个波长,仅几个厘米),按直角/等边三角形布设而装在一个很小的壳体内。 缺点: 系统安装后的校准困难; 测量目标的绝对位置精度依赖于外围设备。 优点: 集成系统价格低廉,操作简单; 安装方便,大船小船都可以使用; 与短基线声学定位系统相比,船底水听器阵受船体动态影响小,定位精度更高; 第八章 水深测量及海底地形测量8.1海底地形测量概述海底地物主要是指礁石、沉船、海底障碍物及人工构筑物等天然或人工形成的各种固体物体 海底地貌是指高低起伏的海底形状,包括浅滩和深沟等。 海底地形测量的主要内容:水下工程建筑、航道、沉积物厚度、沉船、海洋生物分布区界、水文要素 海底地形测量的发展与测深手段的不断完善紧密相关:单波束回声测深、多波束测深系统、机载激光测深系统、侧扫声纳系统 8.2水深测量8.2.1回声测深原理回声测深仪:20世纪20年代出现,利用声波在水中的传播时间。 回声测深仪由发射机、接收机、发射换能器、接收换能器、显示设备和电源部分组成。 回声测深的原理:设自发射脉冲声波的瞬间起,至接收换能器收到水底回波时间为t,则换能器表面至水底的距离H为:$H=\frac{1}{2}Ct$。 回声测深仪总改正数:为了求得实际正确的水深而对回声测深仪实测的深度数据施加的改正数。 方法: 1.校对法:==浅海区域==宜采用校对法求测深仪总改正数。 2.水文法:水文资料法适用于==水深大于20m==的海区。 校对法求总改正 用检查板、水听器等置于换能器的下方一定深度H处 ,与测深仪在当时当地的实测深度$H_S$作比较,其$\Delta H$即为测深总改正数。 水文法 测深仪总改正数包括==吃水改正、转速改正、声速改正==。三项改正中,==声速改正==对总改正数影响最大。 ①吃水改正 测深仪换能器有两种安装方式:固定式安装、便携式安装 由水面至换能器底面的垂直距离称为换能器吃水改正数 ②转速改正 由于测深仪的实际转速不等于设计转速所造成的。 ③声速改正 海区实际声速不等于设计声速。 声速测定的方法:深度对比法、声波速度计直接测定、间接法。 例: 单波束回声测深仪的缺点 回声测深仪的分类 按照频率 单频测深仪:仅发射一个频率的超声波,以测量海面到海底表面之间的垂直距离,即水深。 双频测深仪:垂直向水下发射高、低频脉冲,由于低频脉冲具有较强的穿透性,因而可以打到海底硬质层,获得深度Hlf,高频脉冲仅能打到海底沉积物标称,获得水深Hhf,两个脉冲所得深度之差便是淤泥厚度Δh。 8.2.2多波束测深系统8.2.2.1==系统组成==8.2.2.2波束的发射、接收流程多波束探测采用==发射、接收指向性相互垂直==的==两组换能器基阵==获取一系列垂直航向分布的窄波束。 8.2.2.3多波束测深原理==波束脚印==:测深的各个“足迹”是依赖于发射和接收基阵在海底照射区域的交叉来获得,形成多波束的投影区,称为波束脚印。 各个波束测量中的水深值与水深位置: 扫海宽渡 8.2.2.4==多波束数据处理==波束在海底投射点位置的计算需要船位、潮位、船姿、声速剖面、波束到达角和往返程时间等参数。计算过程包括如下三个步骤: 1. 姿态改正 船体姿态对换能器的吃水深度、基阵中心、波束到达角等均有直接影响,当横摇或纵摇达到一定程度,深度和平面位置的计算均会受到影响,必须考虑。 2. 船体坐标系下波束投射点位置的计算 海水中声速不同,声线不是直线。根据波束入射角、往返时间和声速剖面进行精确跟踪,可获得波束脚印的实际位置。 3. 波束脚印的空间归位 深度方向上的深度归位计算;水平位置上的归位计算。 8.2.2.4.1姿态改正8.2.2.4.2声线跟踪为了得到波束脚印的真实位置,就必须沿着波束的实际传播路线跟踪波束,该过程即为声线跟踪,通过声线跟踪得到波束投射点在船体坐标下坐标。 波束脚印船体坐标的计算需要用到三个参量,即==垂直参考面下的波束到达角、传播时间和声速剖面==。 声线跟踪过程中声速剖面扮演者有十分重要的作用。 为了计算方便,对声速剖面做如下假设: ①声速剖面是精确的,无代表性误差。 每次测量前后需对声速剖面进行测定 遇到水域变化复杂的情况,需加密声速剖面采样站和减小站内声速断面采样的间隔,全面真实的反映测区内海水中的声速变化特性; ②声速在波束传播的垂直面内发生变化,不存在侧向变化。对于不满足该要求的水团,需要加密声速剖面采样站和减小采样层的层间间隔; ③声速在海水中的传播遵循Snell法则。 8.2.2.4.3波束脚印的空间归位波束脚印的空间归位:将波束脚印的船体坐标转化到地理坐标系(或当地坐标系)和某一深度基准面下的平面坐标和水深。 地理坐标系(或当地坐标系):原点位于换能器中心,x轴指向本地子午线,y轴与x轴垂直指向东,x轴与y轴构成右手正交坐标系。 8.2.2.5条带数据拼接选择所需的地理坐标系统,将测区各个条带的水深数据和定位测量信息按照先后顺序及位置关系,形成测区完整的离散水深数据集文件。 8.2.2.6多波束测深特点将传统的测深技术从点、线扩展到面,测量范围大、速度快、精度和效率高; 记录数字化,可实时自动绘图。 8.2.3水位改正测量的水深是指海面到海底的垂直距离。但是在海洋测量中因为受潮汐、海流风浪等多种因素的影响,海面处于动荡不定的状态,尤其受潮汐的影响,海面随时在升降。高潮和低潮之差,小的差1-2m,大的差10-20m。 ==水位改正==目的是尽可能消除测深数据中的==海洋潮汐==影响,将测深数据转化为以当地深度基准面为基准的水深数据。 潮位改正——为了正确的表示海底地形,需要将在==瞬时海面测得的深度==,化算至以==平均海面==或==深度基准面==起算的深度。 针对海道测量而言,在实际测量过程中不可能观测测区内每一点的潮汐变化,因此,水位观测过程中采用==以点带面==的水位改正方法,这在一定区域(验潮站有效范围)内符合潮汐变化规律。通过实际和理论验证,在验潮站有效范围内,==验潮站的水位变化可以代表此区域的潮汐变化==且能满足测量精度要求。 水位改正的方法有:单站水位改正法、线性内插法、水位分带改正法、时差法、参数法 8.2.3.1单站水位改正当测区不大时,在某一验潮站的有效控制范围内,用该站的水位资料对所测的水深进行水位改正,称为一个站的水位改正。 方法有:图解法、解析法。 8.2.3.2多站水位改正当测区位于A、B两个验潮站之间,且超出两站的有效控制范围时,对测区内各点任意时刻的水位改正方法。 在海区设计时增加验潮站的数量 根据A、B两站的观测资料对控制不到的测区进行线性内插 8.2.3.3水位分带改正法n测区范围较大时,用一个站的水位不能控制整个测区时,可采用两个站的水位资料进行水位分带改正。 分带的前提条件:两站之间潮波传播均匀。 同相潮时和同相潮高的变化与其距离成比例。 有潮波图,判断主要分潮的潮波传播是否均匀;没有潮波图,根据自然地理条件、潮流等因素分析 8.2.3.4潮时差法前提:假设两个验潮站之间的潮时和潮高的变化与距离成正比。 解算过程: 1. 求解潮时差 2. 求解任意点水位改正数 潮时差——两个验潮站的水位信号相似时的时差叫做潮时差。 8.2.3.5参数法详见课本P182。 8.2.4测深精度测深数据缺少多余观测。 水深精度主要取决于对影响水深值的系统误差和可能的随机误差的估计精度。 测深的误差 深度测量等级 8.3海底地形测量此部分只列出测线布设相关内容,其他内容请读者参照PPT第八章 海底地形测量小节。 8.3.1测深线的布设测线是测量仪器及其载体的探测路线,分为计划测线和实际测线。海底地形测量测线一般布设为直线。 海上测线又称测深线。测深线分为:主测深线、补充测线、检查线 确定测线布设的主要考虑因素是==测线间隔==和==测线方向==。 8.3.1.1测深密度测深密度:同一测深线上水深点之间所取的间隔。 确定测深密度主要根据以下几个因素: 1. 海区的重要性(军事及经济建设的实际需要); 2. 海底地貌的复杂程度(水深、起伏变化、海底底质和障碍物情况等); 3. 测量设备(定位、测深和数据采集系统)的技术性能; 4. 测量工作量和测量成本; 5. 测图比例尺(测图比例尺通常由上述几个因素共同确定)。 8.3.1.2==测深线的布设方向==测深线的布设方向的基本原则: (1)有利于完善地显示海底地貌。近岸海区海底地貌的基本形态是陆地地貌的延伸,加上受波浪、河流、沉积物等的影响,一般垂直海岸方向的坡度大、地貌变化复杂;而平行海岸方向的坡度小、地貌变化简单。因此,应选择坡度大的方向布设测深线。在平直开阔的海岸,测深线方向应垂直等深线或海岸的总方向。 (2)有利于发现航行障碍物。平直开阔的海岸,测深线垂直海岸总方向,减小波束角效应,有利于发现水下沙洲、浅滩等航行障碍物;在小岛、山嘴、礁石附近,等深线往往平行于小岛、山嘴的轮廓线,该区布设辐射状的测深线为宜;锯齿形海岸,一般取与海岸总方向约成45°的方向布设测深线。 (3)有利于工作。在海底平坦的海区,可根据工作上的方便选择测深线的方向,以利于船艇锚泊与比对、减少航渡时间。此外,在可能的条件下测深线不要过短,也不要经常变换测深线的方向。 8.3.1.3==测线间距==8.3.1.4检查测线8.4侧扫声呐系统8.4.1原理概述8.4.2局部隆起回波记录8.4.3局部凹陷回波记录8.4.4特点可以观察出水底地貌的变化,有没有碍航物和水底沉积物等。 侧扫声呐只能观察水底地貌的变化,对水下物体的大小、深度只能凭经验和记录信号粗略计算得出。 要想详细探测还得借助于潜水员潜摸、单波束测深仪、多波束测深仪探测等其它办法。 第九章 海图绘制此部分主要摘录海图的内容形式、类别划分、数学基础,其余部分可与地图学对比学习。 9.1海图的特点9.2海图的主要内容海图的内容可以划分成:数学要素、图形要素、辅助要素 9.3海图的类别划分9.4海图的数学基础9.4.1投影的选择投影选择是根据所编地图的==特定用途、要求==和==制图区域的条件==,选择一种最优投影,建立严格科学的数学基础,使地图最大限度地符合用图者的要求。 投影选择的一般原则: 1. 充分考虑各种投影的变形特征,所选择投影的变形要尽可能小,并符合地图的用途; 2. 单幅图选择投影时,要考虑与配合使用的投影,与配合使用的图的投影尽可能一致; 3. 在保证上述要求的前提下,尽可能选择经纬网图形简单的投影,以便计算、展绘、作业 和使用。 4. 新编图的投影与基本资料图的投影尽可能一致或接近,以便作业、投影转换和保证成图精度。 海图的投影选择 1.航海图的投影选择 船舶航行时通常保持分段等角航行。因此,航海图的投影必须是等角的,墨卡托投影(等角正圆柱投影)具有这种性质,国际海道测量组织IHO要求航海图采用==墨卡托投影==。 2.通用海图的投影选择 通用海图包括==海底地势图(海区形势图)==和==海底地形图==。这两类图比例尺不同,包含的地理区域不同 ,用途也不同,其投影的选择也必然会有差异。海底地势图一般比例尺较小,包含的地理区域较大。目的是了解区域的形势。为了方便海底地势图和航海图资料的转绘和对照,各国出版的海底地势图,绝大多数采用==墨卡托投影==,与航海图一致。海底地形图比例尺相对较大,要求有较高的量测精度。这类图可供选择的投影较多,各个国家常常根据本国的地图位置、区域形状、投影使用习惯,以及与陆地地形图协调一致等来选择投影。一般选择与航海图统一的==墨卡托投影==或者与陆地地形图相一致的==高斯-克吕格投影==。 3.专题海图的投影选择 专题海图的内容很广泛,表示方法也很多。综合各国经验,与航海有关的各种专题海图,即航海参考图,应采用==墨卡托投影==编制。 各种非航海用的专题海图,如只作为参考用,对限制投影变形没有特定要求时,也应尽可能采用==墨卡托投影==。 | 

 & m1 {, M- Z6 U L. z9 r! ^3 b, G ]
& m1 {, M- Z6 U L. z9 r! ^3 b, G ]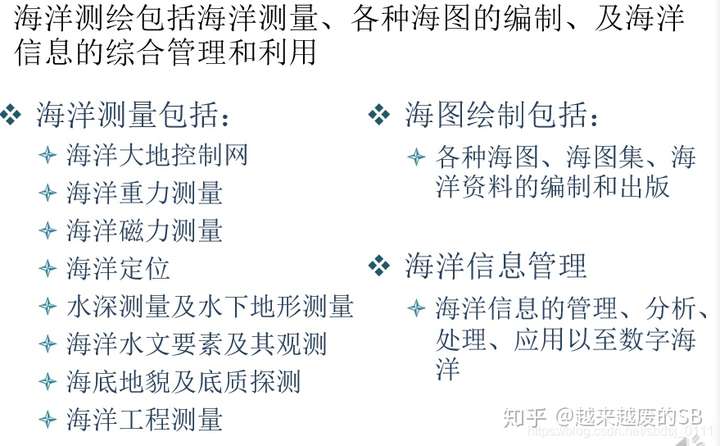
 0 X, u$ @ t& j: B* ?! Q
0 X, u$ @ t& j: B* ?! Q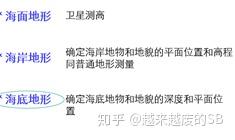 + i( x. }& ?( B# P7 P
+ i( x. }& ?( B# P7 P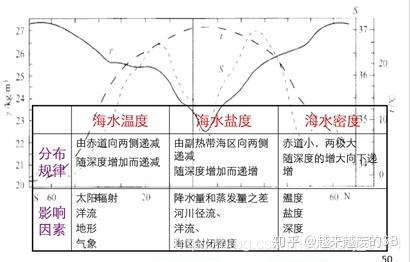 $ h# i. n0 e2 `4 X2 z' N
$ h# i. n0 e2 `4 X2 z' N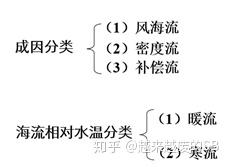
 1 m. L! I3 \ E
1 m. L! I3 \ E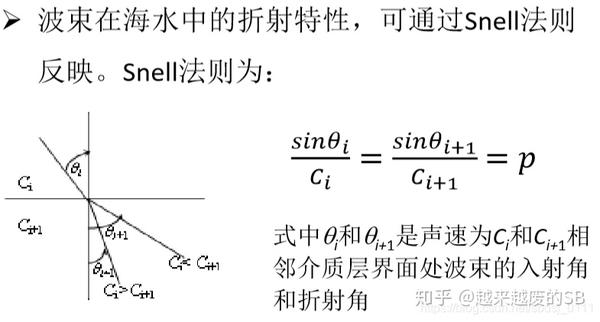 % g2 q& P j. M7 a* f4 L4 m
% g2 q& P j. M7 a* f4 L4 m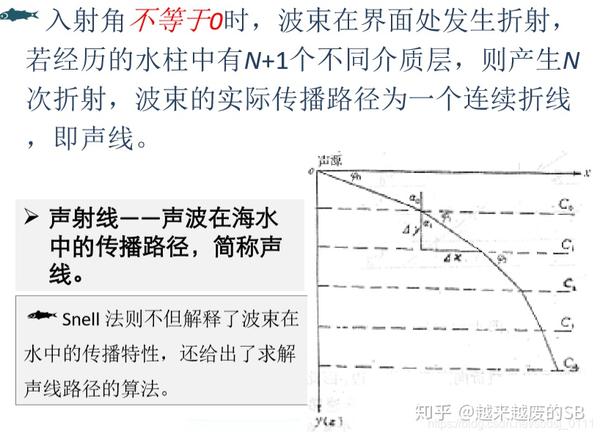 ! Z! R8 {+ ]/ r$ m+ Y6 U) j+ k
! Z! R8 {+ ]/ r$ m+ Y6 U) j+ k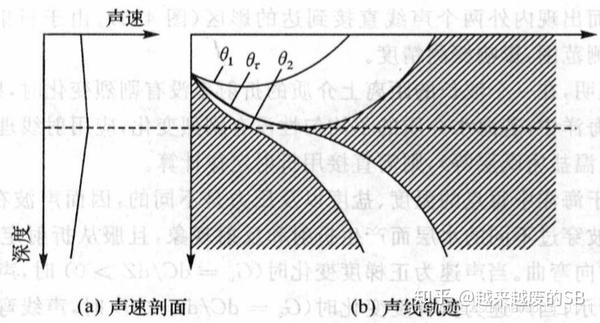 % \; r$ t' T+ [4 N. ~6 B7 P
% \; r$ t' T+ [4 N. ~6 B7 P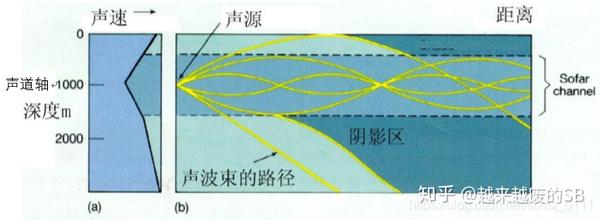
 9 |1 B+ @3 J) Q" U* ^0 u) n h
9 |1 B+ @3 J) Q" U* ^0 u) n h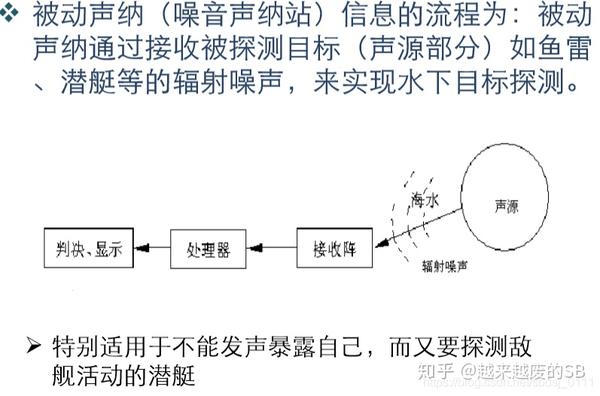
 ( ]' r3 O2 \% p/ y
( ]' r3 O2 \% p/ y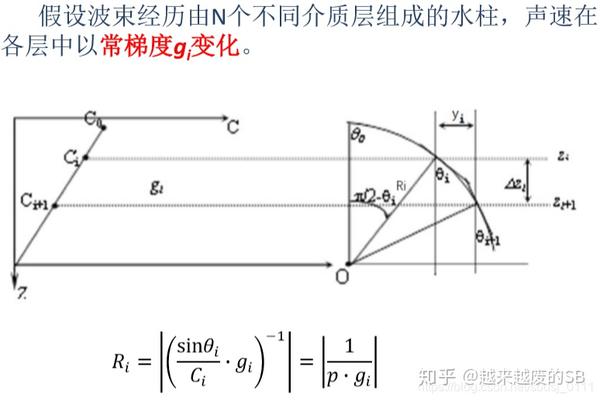 & Y, L! @7 N3 j- }8 ~: J$ |
& Y, L! @7 N3 j- }8 ~: J$ |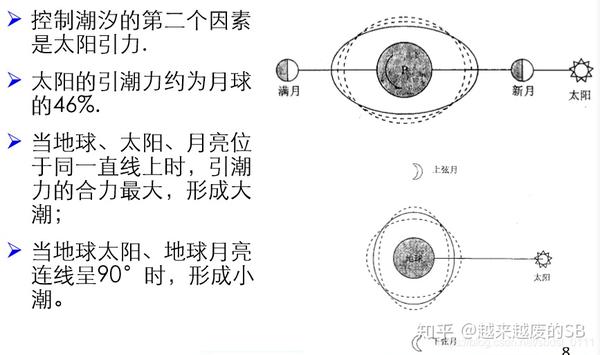 2 B0 G; `& m3 F4 F3 v% y w
2 B0 G; `& m3 F4 F3 v% y w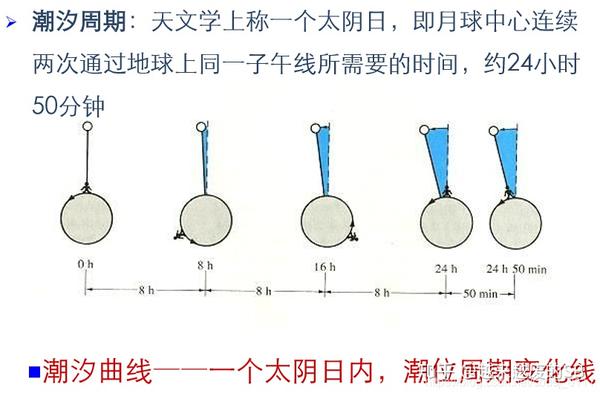
 % r1 u0 ^) _5 T; c5 N+ G' i" z1 P
% r1 u0 ^) _5 T; c5 N+ G' i" z1 P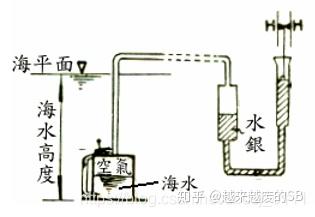
 ! O+ i" d& }7 S! x: k, ^
! O+ i" d& }7 S! x: k, ^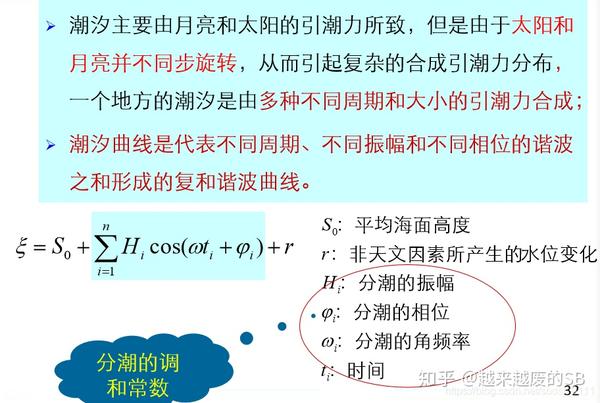
 v B* H) O1 g+ j
v B* H) O1 g+ j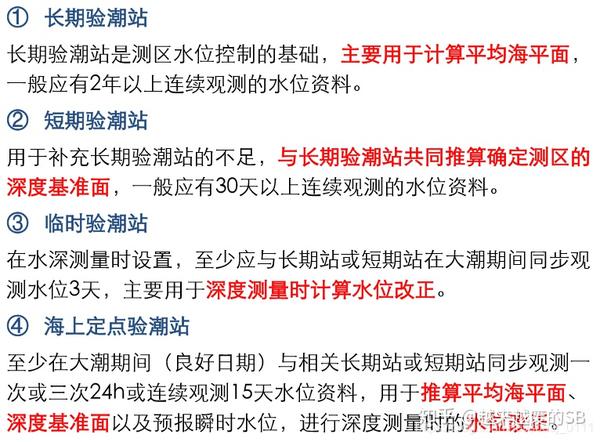 5 P# X" d% f2 T" |1 N
5 P# X" d% f2 T" |1 N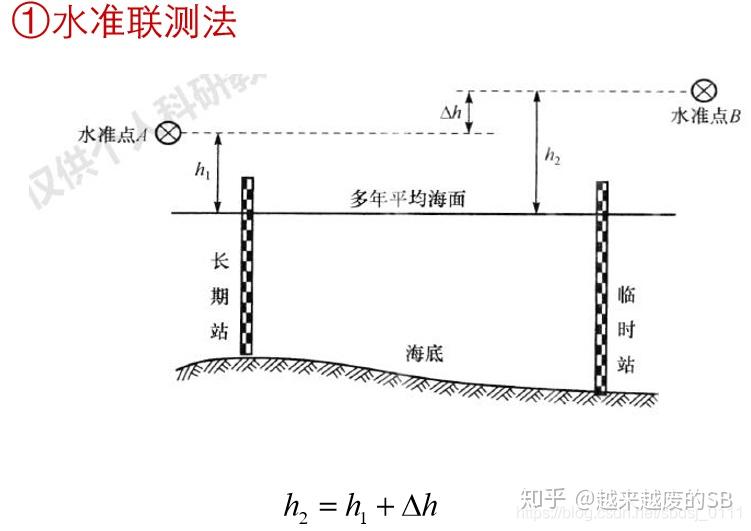 % r0 j) |( _3 h! U% ?! Y
% r0 j) |( _3 h! U% ?! Y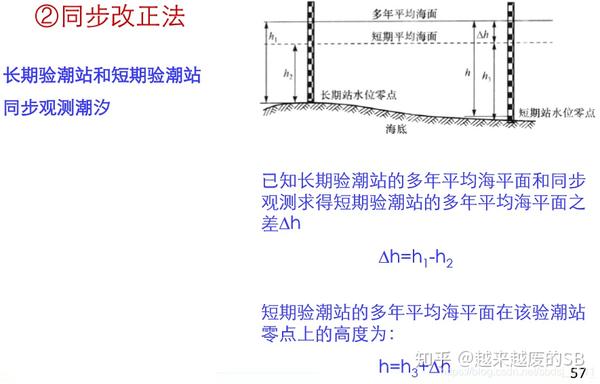
 , i6 u9 ^6 l' n, K" M' {
, i6 u9 ^6 l' n, K" M' {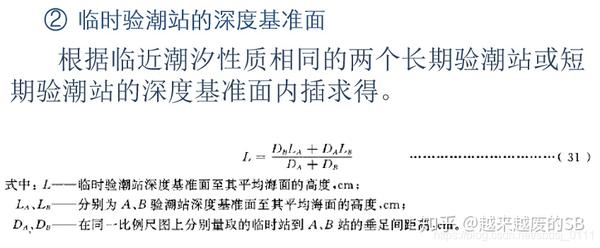
 2 U, {' m, A) T# }: C( ?5 L
2 U, {' m, A) T# }: C( ?5 L
 " M" m' t @: V' n+ ]7 {8 L- e V
" M" m' t @: V' n+ ]7 {8 L- e V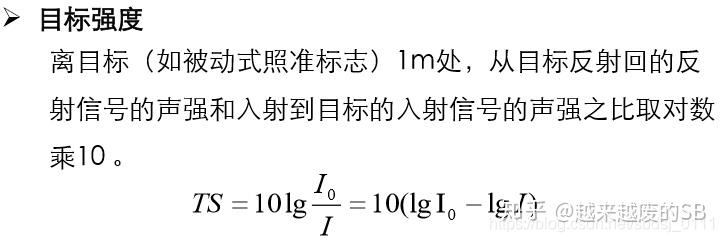 0 V2 q" w5 m2 e" M
0 V2 q" w5 m2 e" M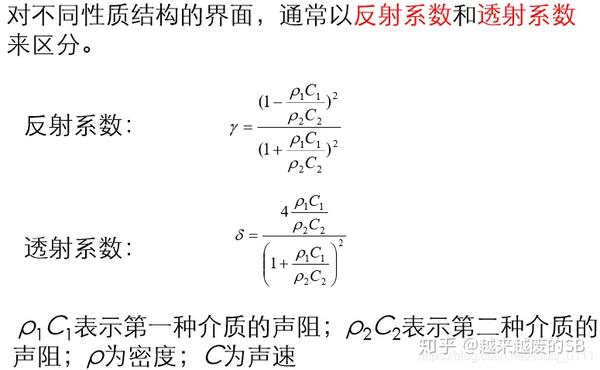 K( d3 t) h$ T) B9 _' P
K( d3 t) h$ T) B9 _' P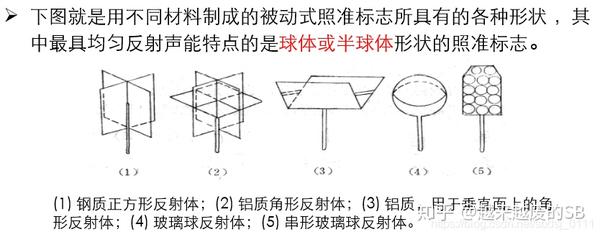 , y+ p) e0 Z/ p' S2 u/ ^% `
, y+ p) e0 Z/ p' S2 u/ ^% `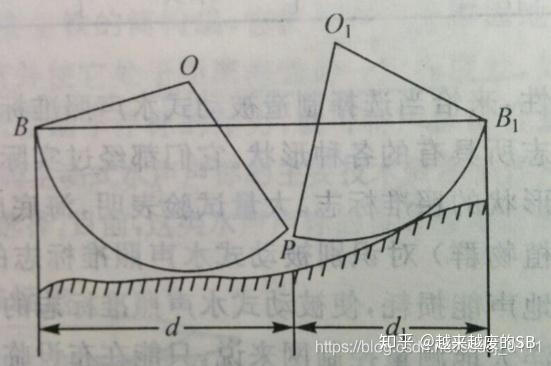 ( x ^9 }$ d2 A: h6 }
( x ^9 }$ d2 A: h6 }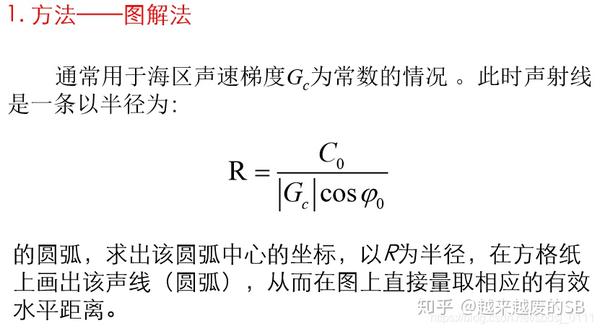
 0 I/ C6 ~ ^" \, O$ ?7 M. {
0 I/ C6 ~ ^" \, O$ ?7 M. {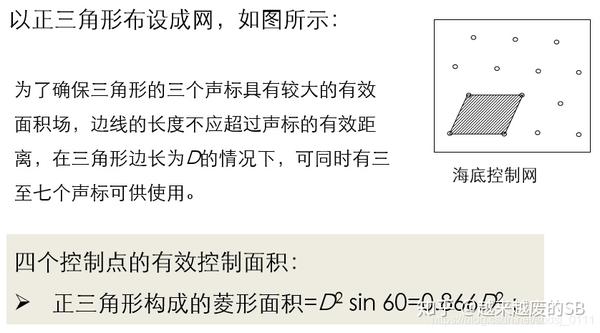
 8 u( T. {6 E7 x7 m C5 `
8 u( T. {6 E7 x7 m C5 `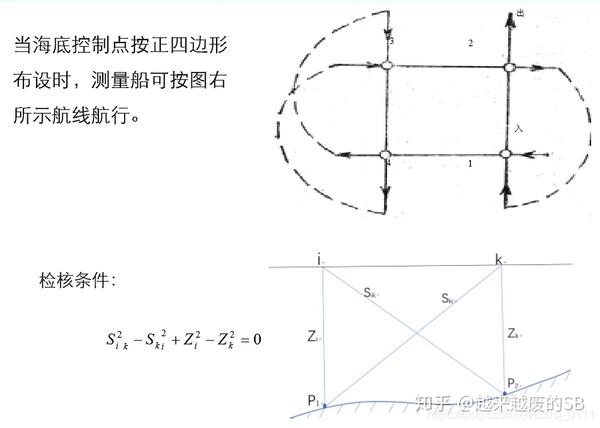 # i1 C! B% o) w }! b1 u3 z& z, t+ E6 m
# i1 C! B% o) w }! b1 u3 z& z, t+ E6 m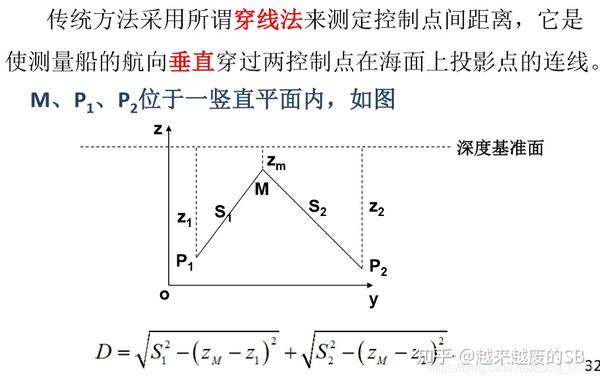 4 z Q. I0 D' d
4 z Q. I0 D' d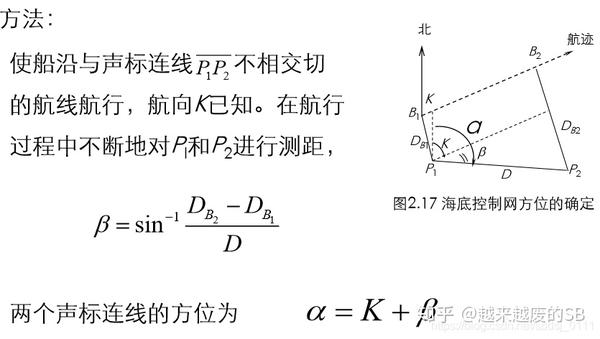
 7 @: _9 a, C9 E
7 @: _9 a, C9 E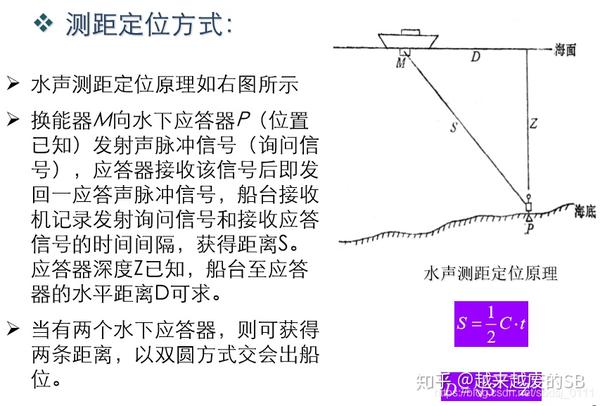
 0 x* Z1 n* x2 M- P/ p3 |, n
0 x* Z1 n* x2 M- P/ p3 |, n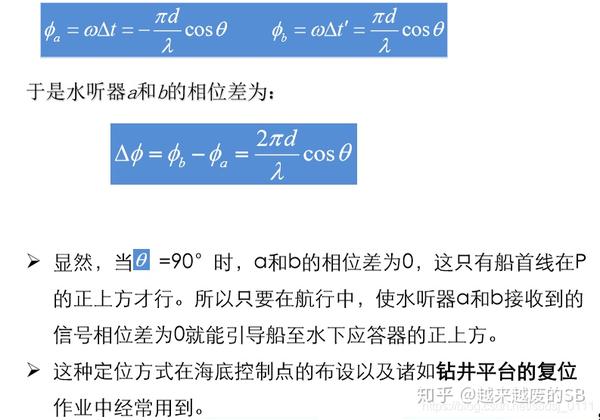
 / ^7 }5 c. ^$ u+ K+ u# P. [
/ ^7 }5 c. ^$ u+ K+ u# P. [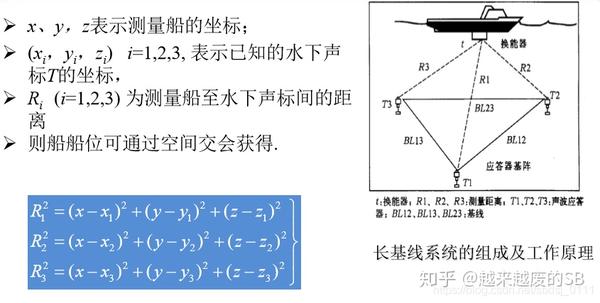
 1 w/ c7 U1 p {
1 w/ c7 U1 p {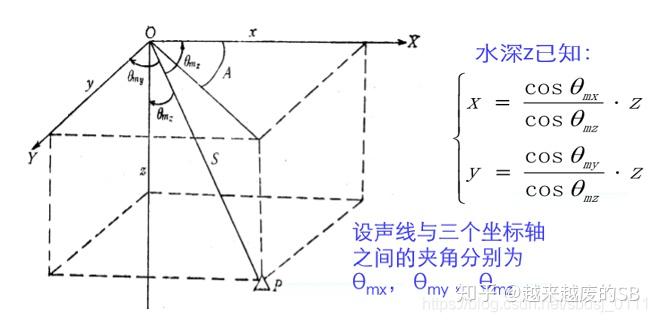 ; ^& n6 V/ n7 |$ X% V' }
; ^& n6 V/ n7 |$ X% V' }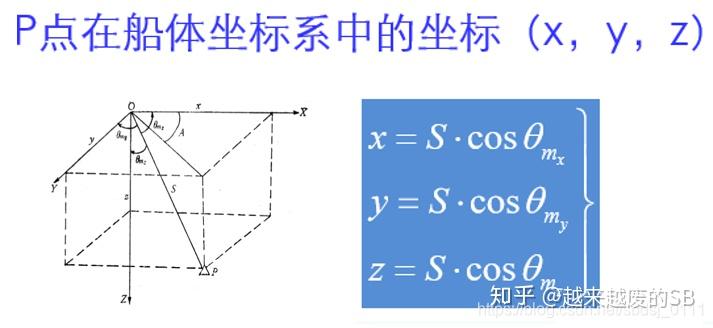
 1 e" `/ S+ A8 S4 x0 D0 ]2 X' _; r4 G
1 e" `/ S+ A8 S4 x0 D0 ]2 X' _; r4 G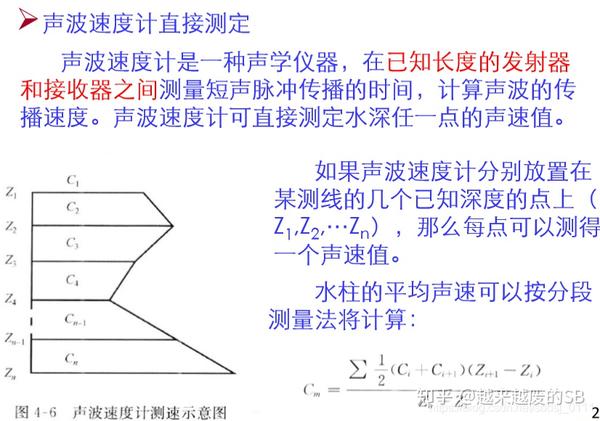 . t) m3 F0 K9 x+ b# y/ G! m3 o8 v
. t) m3 F0 K9 x+ b# y/ G! m3 o8 v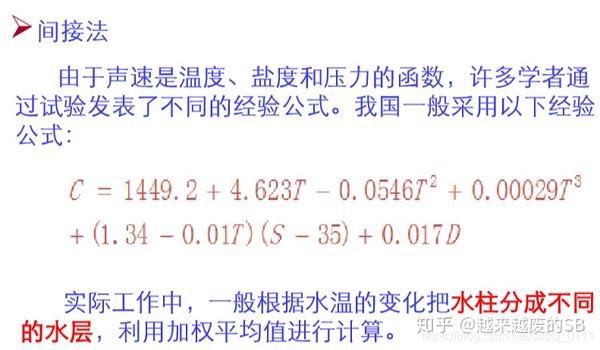
 5 e1 m+ t5 s) F& T+ s$ P1 p
5 e1 m+ t5 s) F& T+ s$ P1 p
 - p# g3 q/ |/ a% |/ E k" r
- p# g3 q/ |/ a% |/ E k" r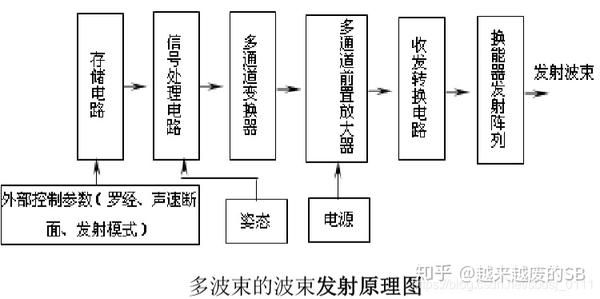 6 u& W# @* k0 Z# ^6 ~
6 u& W# @* k0 Z# ^6 ~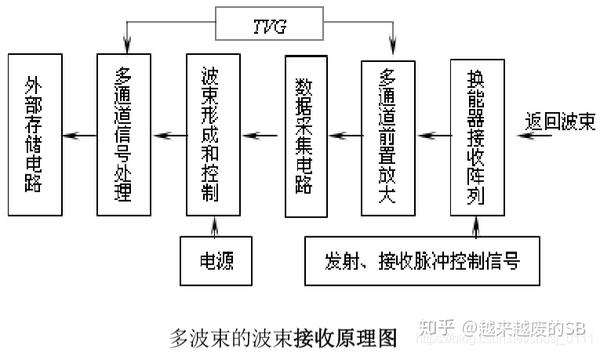 # p" n/ m0 ?. ~
# p" n/ m0 ?. ~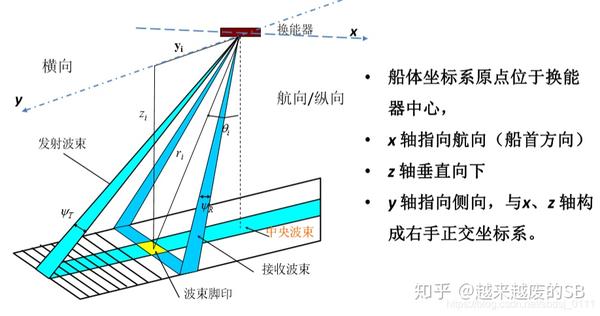 ) f( `; x1 }: e% H* v; v% |) v
) f( `; x1 }: e% H* v; v% |) v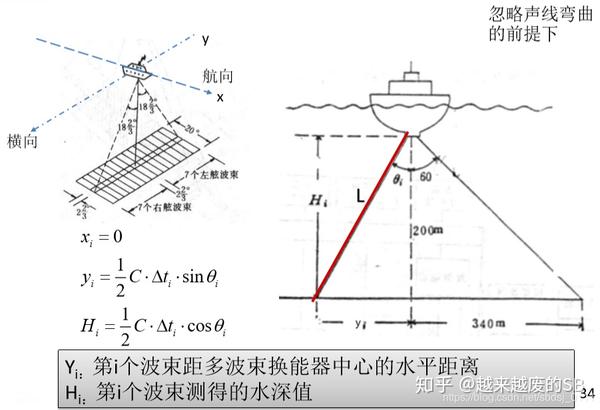
 " G! z7 i0 t: K
" G! z7 i0 t: K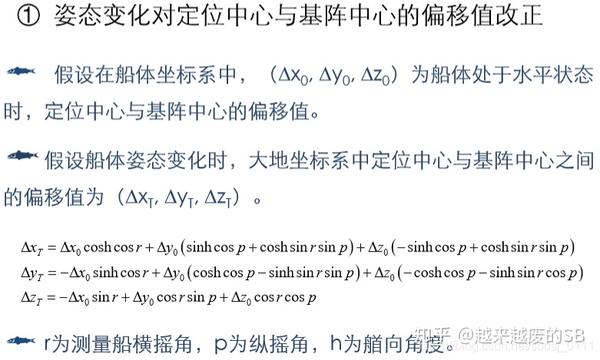 5 M8 a! U9 M. B; @
5 M8 a! U9 M. B; @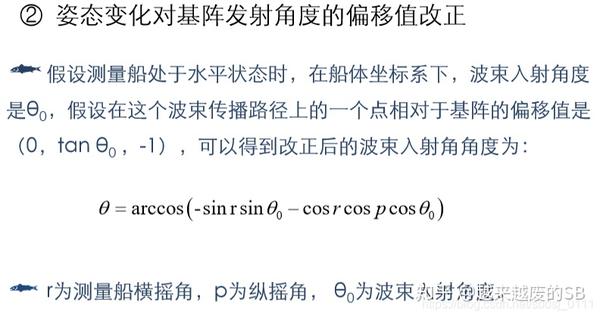 1 ~* e/ C0 y4 m g
1 ~* e/ C0 y4 m g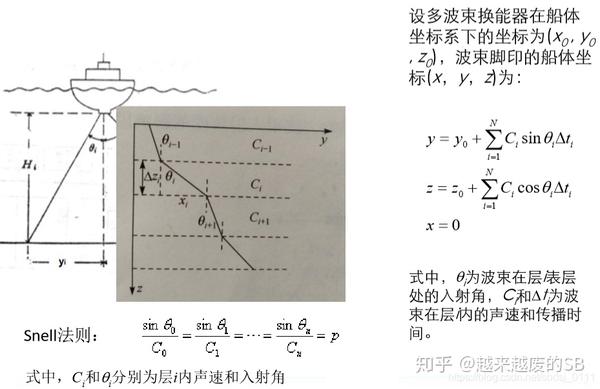 ( [- z( l( |+ n+ r" W1 W- ]
( [- z( l( |+ n+ r" W1 W- ]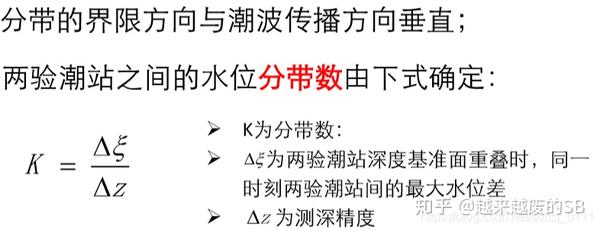 7 p6 R0 e- y/ B/ n1 v* U
7 p6 R0 e- y/ B/ n1 v* U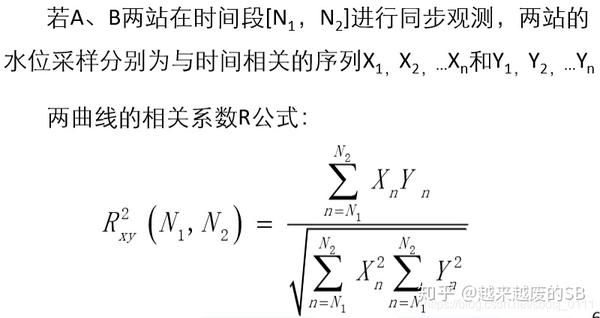
 * U; O+ C1 w) Q1 Z v5 i4 Z
* U; O+ C1 w) Q1 Z v5 i4 Z ; w: L! E, p# {$ Y; G
; w: L! E, p# {$ Y; G
 % C% K6 k; n9 J; Z6 Y; a
% C% K6 k; n9 J; Z6 Y; a 1 M, n: R$ V' C) Q
1 M, n: R$ V' C) Q
 % V | h5 N ]$ W6 z( g+ z
% V | h5 N ]$ W6 z( g+ z