妈妈'新无人潜航器在德国成形
' A- g" O$ [) Y( ~0 B9 R9 N- G% r) l% X" k- e
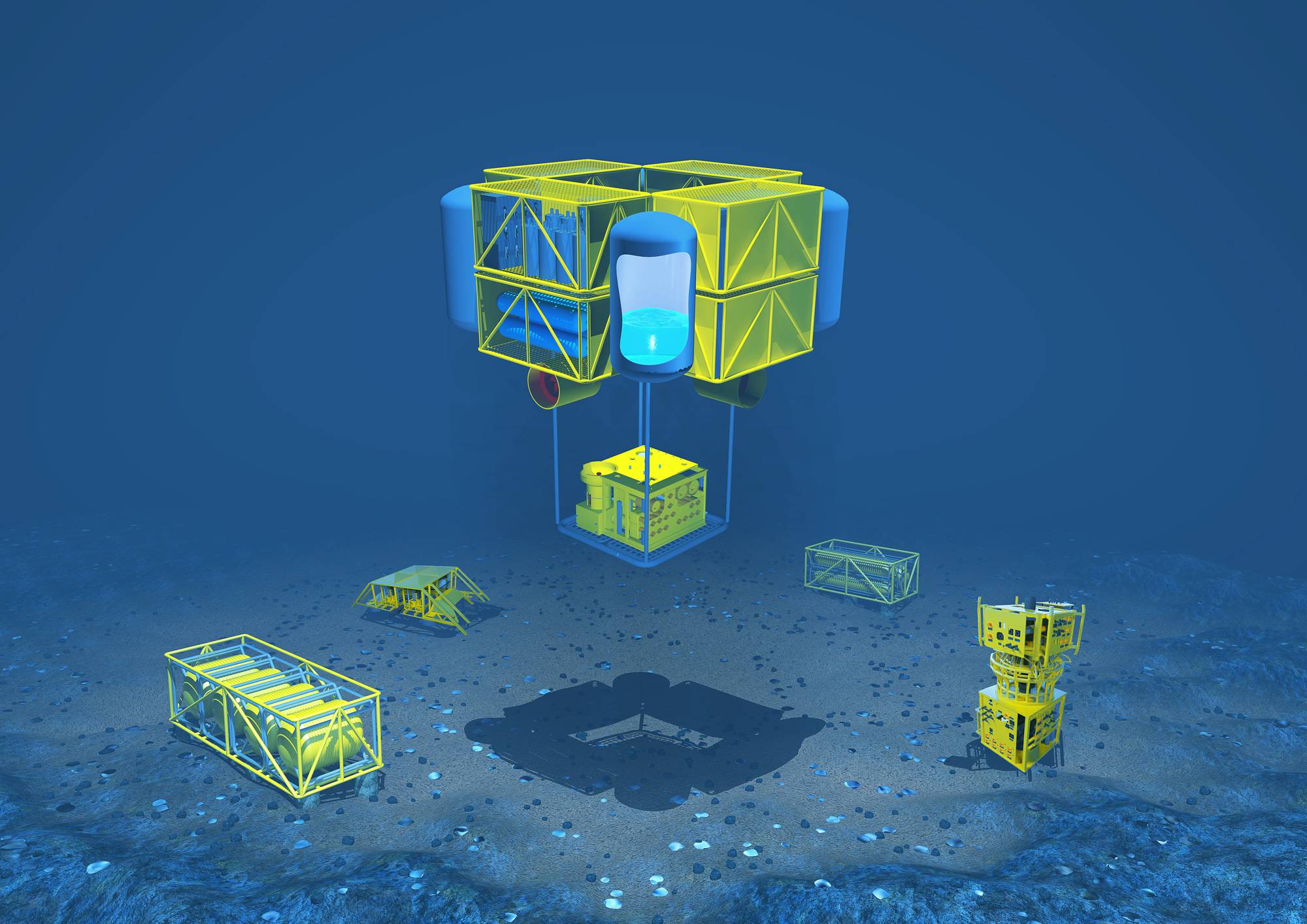
认识MUM:大型可改装水下母舰。图片:蒂森克虏伯) K3 x2 Z) ^! `, F
" H/ p: o' q) ~4 b大型可改装水下母舰(MUM)将德国的工程实力和合作带到了前台。& Y, z* y& O3 H' P+ M
5 m+ }* t4 k- f) C8 B随着自动驾驶汽车在陆地和空中的蓬勃发展,尽管近年来在海上提供完全自主、高效的系统方面取得了长足进步,但海底应用已被证明更具挑战性。来自德国的一个工程师团队,来自工业界和学术界的工程师团队,旨在通过一个名为“大型可修改水下母舰”(MUM)的项目,更快地推动水下运载工具市场。
! m2 y" Z' L L! ]" c [4 B % \+ C- [' m( C; Q
该项目汇集了几个著名的实体,包括蒂森克虏伯、柏林技术大学、罗斯托克大学、Atlas Elektronk和EvoLogics的工程师,他们共同致力于;开发一种新型无人潜航器 
. h8 M$ U6 j E0 p# Z) g ) }! s u" t) r6 S; @" |/ X- p
MUM将在三年内获得德国联邦经济事务和能源部的资助,其目标是开辟探索和利用世界潜力的新途径;海洋。- Y; {- `0 R1 n X5 E1 p' k" \
, s m* U1 `" L' G认识MUM4 p1 |) L" t. K" A& Y) R
根据合作伙伴的说法,MUM正在打破旧的惯例:模块化无人潜航器在很大程度上自主执行任务,创新的模块化设计使新的潜航器级别能够针对每次任务进行成本高效的定制。单个基础模块可以与特定任务模块自由组合,形成大型系统,即使是不寻常的高度专业化任务也可以快速轻松地执行 
4 F2 P. @( A7 n) M 3 l7 w: `1 C, k( q9 ]2 q- h
可能的活动范围从有效载荷运输和操作到研究任务和固定深海任务,能够解决工业和科学领域的工作。
/ p( r7 M) d" F( v5 j
9 E9 ]0 h, A# }+ |" ]; y2 J海底自主性的一个主要限制是解决功率问题,在这方面,MUM将寻求引入无排放燃料电池推进系统,以实现深度潜水和长距离持续时间。
6 u4 T7 `' l3 N j" G9 E! K - S0 l8 i4 E- j2 ?
“世界;海洋提出了一系列尚未解决的任务和问题,因为我们没有;t具有适当的车辆和系统;蒂森克虏伯海洋系统公司的项目经理Marc Schiemann说"MUM提供- D! ~& N( t( o7 l
为工业海洋工程和海洋科学研究提供了丰富的新选择。我们将为漂浮的无线水下航行器配备一个独立于空气的燃料电池推进系统。我们的目标是开发一种潜水深度可达5000米并可连续运行数周的潜水器。” 6 ?# x/ \$ I* s* @9 P1 R
MUM的有效载荷能力为数吨,即使是重型任务也能处理。单个模块可以重复使用,与传统车辆概念相比,可以显著降低成本,并加快开发周期。新开发的任务模块也易于集成。) T& [: l4 Z! Y+ T7 R9 U) z; [
: D. u. b& q7 I* O! b
妈妈20259 i0 ^# ]0 q' \% u9 ?, N
该项目的研发工作预计将于2020年完成,并将建造和测试一个1:5比例的模型。合作伙伴的目标是到2025年做好市场准备。* a3 G$ B: \( r: y3 J
% ~% T, o8 V A4 a1 ]4 Q$ e9 F$ \2 V蒂森克虏伯是项目协调员,将与柏林技术大学密切合作,制定MUM的整体运营理念,并将其转化为船舶的设计草案。该公司还将开发和测试燃料电池的能源供应。Atlas Elektronk负责包含罗斯托克大学提供的控制功能和EvoLogics开发的通信的制导和导航系统(GNC)。柏林技术大学将把硬件集成到车辆概念中,并测试MUM的规模模型。EvoLogics将负责开发遥测网络,以实现新型潜水器的自主和精确的水下导航、定位和通信。罗斯托克大学将开发一种智能容错控制系统,使其适应可变的车辆结构和不断变化的动态行为。* E/ a9 K. b9 J4 a+ T3 n
_+ ~4 n" U/ b; ^3 F3 }http://mum-project.com/
4 |+ T' y5 q' `% d7 k8 \1 l: C
/ G9 t$ e4 |/ Y. s&公牛;蒂森克虏伯&公牛;燃料电池&公牛;德国 |