|
% x0 i1 K0 T" A; a# y. N

" t9 i. Z+ d( O2 v% N 【天帆智能 喜讯】
1 @1 j1 ?8 Q$ u 2021年08月11日,由哈尔滨工业大学(威海)与威海天帆智能科技有限公司共同研发的国内第一艘海洋牧场养殖观测无人船,在威海市德明海洋牧场进行海试并交付使用。
' {9 H% f; Q9 w4 g
$ L) r3 g( z7 L R) O$ b
$ u0 M. q$ ^9 K+ c: H
# |# }$ T$ m1 b: H# B1 W
% X# }) J4 K" E& a
$ v+ q; y( n( Q! o) l 关闭
6 @ r, c9 Q" _! K8 p$ w3 ~- a 观看更多 9 Z6 R& O/ f& B* @0 v
更多 4 C, ]/ B/ d, |# f" Q# y
5 `) k/ n% E+ b6 @4 F
9 Y" l5 [4 C7 X! D# t* p 4 v ?) ^6 o7 L
正在加载 * d. O- W4 I- @4 b& e9 O
正在加载
$ v6 B- ^& R! F* C # ^4 Z$ D5 S* k8 T; |6 g
& M7 t1 [7 [% g: L; z9 x ; k5 _8 |! [, s O" e6 H; f* P$ ?
( R0 F8 X& _; I1 F- b2 o
7 t* t9 r7 _3 ~" K- j9 X: ?
/ e4 n- r3 W+ F+ e+ r+ E* N) b & H/ c/ h5 C! w% ?9 r5 v+ I: X
退出全屏
% h& a9 k6 Y% z) ~+ k! Y3 w
; t7 x9 L- M/ K% v. q & X; T7 S* ~/ G s2 T
3 W" C) l9 U& ]! N0 ]) u" z- | 4 d& v5 N" Q/ ]+ g
& I! i5 ^, `9 ?0 j3 z/ O; D6 |# l
, W( T/ O7 n& _) `! ]6 k 8 E6 r7 u! r8 g! r
( i4 F/ x! y" k1 {7 ?
+ Q/ v6 x0 F+ @2 m9 l f 9 ~- W: M6 j" j0 A
视频加载失败,请刷新页面再试  刷新
9 Z3 Z2 H1 y! C 刷新
9 Z3 Z2 H1 y! C  # E; S9 ?2 f; E1 M+ E; u
# E; S9 ?2 f; E1 M+ E; u
$ d4 e; v9 }. M + u3 k# M/ [8 b
4 C" z9 u% m2 E5 w 3 c* g* X/ X1 [
+ S6 Z; S. D/ o1 B, U' j! p" O5 A
/ i$ w$ S! g6 r, h) p- C0 a" h
, b$ B1 v8 i7 z/ C3 ]
; p0 c: ^/ u; u0 v n! ^( z$ I 9 x$ v* c" f. E% }, Q+ T" T
海洋牧场养殖观测无人船 海试现场 ) i2 _% A7 s$ p9 ~7 M; s

/ j+ v3 l: d' x5 r. z V
下水前 终端调试 准备完毕!
9 Y. c6 X+ q2 n5 y3 ?2 h3 w' d 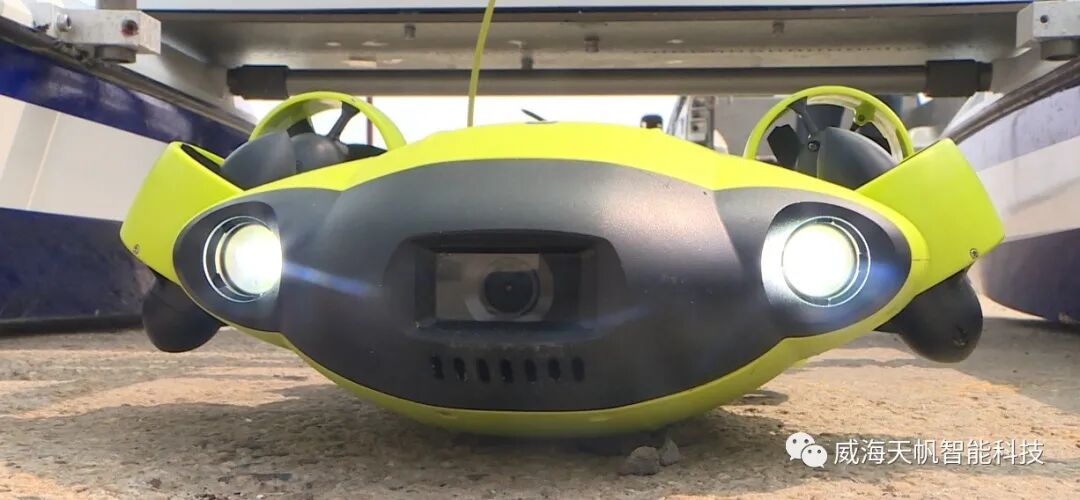
3 F& L4 ] U& O+ W 水下ROV 准备完毕!
2 Q9 Q7 E6 A) }# w 
" p, S# y) u$ _3 y' X# x) ^ 船体设备 准备完毕! + j7 V; q. X0 }3 X

# \7 I' d) S9 x1 X+ c( w 万事俱备 只待出发!
- k @: x* ?1 o9 B, r1 H+ S. V  fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
; @$ U! X1 I) S. b1 [2 T- p 海试ing... ( u/ {5 c; x6 y, v
4 J0 s4 J9 b- D: u9 m
威海德明海珍品养殖有限公司董事长 谢锈芹 至操控区观看 8 Z, C3 y% q4 Q: z! u

/ r- `9 b8 j& g3 U 海试数据回传的海底画面
0 o* o( a" s+ A0 h+ y
& p1 x7 R; u) ~; I0 O- W
媒体采访、拍摄中的海试现场 ! U! s' T" r( M$ v$ f5 `
T240多功能海洋牧场养殖观测无人船参数(部分)如下:
$ Q5 p" l4 ` s, p$ s 尺 寸 :2400mm(长)×1600mm(宽);
6 o9 E/ P' B( e) f3 I 材 料 :高强度碳纤维+凯夫拉复合材料; : M7 p1 ]2 g: M$ L- r+ V# q' a
最大航速:5m/s;
( s, l! B3 x/ F3 `- g1 W3 u, ~$ i 续航能力:≤6h(可扩充);
, I x3 F2 H( ^0 J Y 通讯距离:2-10km; % D6 l) B' n5 e% g- U: F
工作环境:≤2级海况;
: q" P0 H! v |' H: [% ~ 动力系统:双喷泵推进器,操控性优越;
, B4 Q$ {# ]1 V- S$ ~" J5 i2 Z 操控手柄:专用无线可视化,5GHz Wi-Fi,多种操控模式,续航时间可达4小时。 . p5 s, A# i; r- r4 @5 {
水下ROV:全球首款便携式全航向水下无人机,400mm(长)×350mm(宽),搭载4K超高清摄像头,最大下潜深度50m,最高航速1节,独有专利技术的智能矢量螺旋桨阵列TM,使得水下机器人轻松打破水下拍摄局限,让使用者发挥想象力,施展更多创作空间。搭载166°广角镜头,画质支持H.265 HEVC格式,支持RAW-DNG格式图片。
' B5 T' @2 Q) v8 V 无人船智能控制软件主要由艇载航行控制系统软件和岸基人机交互控制系统软件组成。两者通过通信系统完成无人船状态信息、控制指令的交换。实现航行控制和信息采集的任务,保证无人船各项任务的顺利完成。
2 o) ], v1 q+ i. D4 I- i& o
, F- \5 F1 }! Z- D2 A1 D (不要问俺为撒知道辣么多,俺还知道↓↓↓) ' Q) Z2 p+ ^) E1 O' i, G
作为水面无人观测艇的大家庭来说,海洋牧场养殖观测无人船只是其中一位家庭成员,而水面无人观测艇的实际应用范围则相当广泛。
$ t& T# M; m3 u/ ~8 t- f 在军事上可用于反恐、排雷、巡逻、监视、侦查、精确打击等,与其他无人系统(如自主式水下航行器、水下滑翔机、无人机等)共同构建立体反潜网络。 " V3 e& m7 Y* I
在民用上主要用于海洋养殖、科学考察、环境监测、资源勘探、水文研究、海上搜救等方面。可通过卫星遥感技术、地波雷达技术、地面气象站、水面浮标技术,与各无人系统一起构建海洋立体观测网从而实现对海洋信息的全面观测和海洋资源的实时监测等。 : {' F6 ~0 R5 y* w& M
8 N2 b5 u* R+ O; g; e7 ~ (敲黑板的知识点!学以致用搞起来!)
, g& a& l% b* I" O 相信此次威海天帆智能科技有限公司 海洋牧场养殖观测无人船的交付使用,不仅会极大推动威海智慧海洋牧场和透明海洋的发展也会更进一步带动全国智慧海洋的前进步伐!
' a4 I( q/ Y9 k1 M$ E
, Z* q" \6 x3 B9 i (最后依旧是我们抛洒橄榄枝滴时刻~) ! V8 c- a0 P9 g) s0 @8 ~4 _3 p' u& j; m
【招聘来一波】:欢迎想和我们一起搞事情的工程师们前来列队集合,翱鲲鹏、待宏图! , A, e" x3 {) v! R7 I9 M
(点击进入公众号,右下方的招贤纳士)
) A8 J& W$ H( N4 w0 K X, G) F/ N# B% u0 G1 |1 i6 H9 O( e& r/ B
" A+ @& L; o7 [' b, q4 w T
| 

