|
) j) O6 r1 F# a5 K
海洋作为地球上最广阔的生态系统和资源宝库,既孕育了无数的生命,也为人类社会的发展提供了重要的资源支持。随着海洋开发的不断深入,人类对海洋环境、船舶设计、海洋工程以及水下机器人等领域的研究和应用需求不断提高。 4 g9 z* ]+ ~# |( F# f8 V! _; O
高精度水下光学三维运动捕捉技术作为一项先进的测量与捕捉手段,逐渐成为船舶与海洋领域中不可或缺的工具。这一技术不仅提升了海洋工程和船舶设计的效率,还为海洋生态监测与环境保护提供了全新的视角。 8 |1 O9 b) \' r0 F) b8 v& d
 : y+ ~8 F1 B, V" f+ q# t+ C
水下光学三维运动捕捉工作原理与挑战
) i# I) s7 p5 y5 n0 R# n 水下光学三维运动捕捉技术的工作原理是通过多台高分辨率水下摄像机同时拍摄带有标记点的目标物体,实时捕捉其三维空间中的运动轨迹,并通过算法处理得到精确的运动模型。 $ p$ T3 _- ]) y }- \; @* g2 K8 V( M
这一过程的关键在于如何克服水下环境中的光学挑战,包括光的折射、散射和衰减。在水下,光线的传播速度比空气中慢得多,这导致了折射效应,使得摄像头在捕捉水下物体时,其实际位置会发生偏移。此外,水体中的悬浮颗粒和微生物也会对光线产生散射,影响成像的清晰度。因此,水下运动捕捉设备需要配备专门的滤光镜和图像处理软件,以尽量消除这些干扰因素。
n& ?! V+ {7 F' k7 A) i0 N  + M6 Z' P7 J& T3 I0 @+ h1 ^
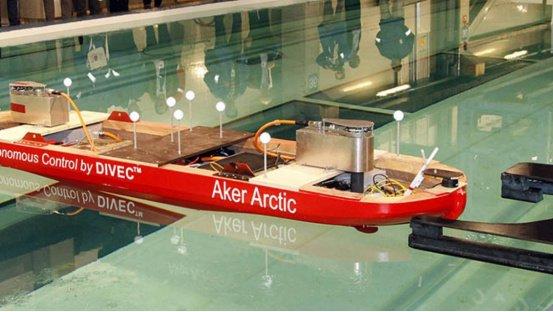
△Boldrewood拖曳水池 6 U Y7 \3 X6 _" k; e
尽管面临这些技术挑战,随着光学技术、图像处理算法和水下传感器的不断进步,水下三维运动捕捉技术已经在多个领域取得了显著进展,尤其是在船舶设计、海洋工程和生态监测方面。
9 N- ^) g/ x9 S: P% x8 x 船舶设计与优化中的深度应用 ; J, @+ D) N7 e9 v f+ S" x/ N. m
船舶设计是一个极为复杂的过程,涉及到多学科的交叉,包括流体动力学、结构力学、材料科学等。船舶在水中的运动受到多种因素的影响,如波浪、风速、流速等,而高精度的水下运动捕捉技术则为船舶设计中的模拟与实验提供了精确的数据支持。 ! k; U6 f* A6 k) E
船体流体动力学优化:传统的船体设计依赖于计算流体力学(CFD)和物理模型实验来分析船舶在水中的流体动力学特性。然而,CFD模拟由于计算资源的限制,通常需要简化许多物理细节,物理模型实验也存在一定的误差。通过三维运动捕捉技术,设计人员可以实时跟踪缩比船模在实验水池中的运动,并捕捉船体在受到不同水动力影响下的位移、旋转和振动情况。基于这些数据,可以进一步优化船体形状,提高船舶的燃油效率,并减少船体的波浪阻力。 ( g) l8 ]+ V+ z$ a* J* k
 : ?) A7 ?; e' E
船舶推进系统的性能评估:推进系统是船舶的核心部件之一,其设计对船舶的航速、稳定性和燃料消耗有直接影响。三维运动捕捉技术可以帮助工程师在实验中精确监测螺旋桨和推进器在工作时的三维运动轨迹,评估其流体动力学性能。例如,技术人员可以通过捕捉螺旋桨叶片在不同转速和负载下的变形和位移数据,分析空泡现象的出现与发展过程,从而优化螺旋桨的设计,减少能量损失和空泡腐蚀带来的结构损伤。
0 J v# G1 R. i: C/ b* J* z 船舶稳定性与抗风浪能力评估:船舶在恶劣海况下的稳定性直接关系到航行安全。通过在波浪池中进行高精度实验,使用水下运动捕捉技术可以精确测量船模在大浪作用下的横摇、纵摇和俯仰等运动模式。基于这些数据,设计人员可以评估船舶的抗风浪能力,优化船体的重量分布和稳定性设计,确保船舶在极端海况下的安全性和舒适性。
5 s+ y T l( n% Q1 L0 r3 J! X5 [+ ^ 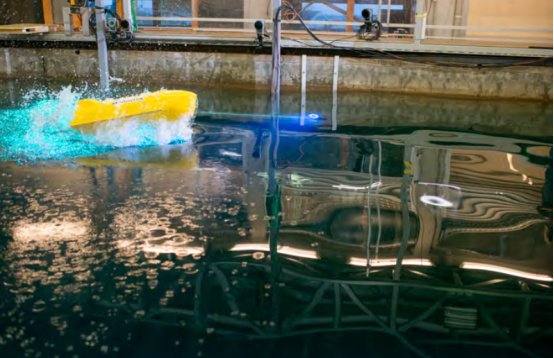
' N& C. U* d# {/ W: z 智能水下设备与自主潜航器的深度优化 % A/ U$ b; K+ s
智能水下设备和无人潜水器已经成为现代海洋开发与探测的重要工具。这些设备通常用于执行复杂且危险的水下任务,如海洋资源调查、海底结构维护和水下考古等。
* l& ~& h$ o& x7 p7 F6 G" a! T0 J 自主潜航器的运动轨迹优化与导航改进:自主潜航器在执行任务时,如何准确导航并避开水下障碍物是其成功与否的关键。通过三维运动捕捉技术,研究人员可以对潜航器在实验环境中的运动轨迹进行精确测量,分析其导航系统的精度和运动稳定性。例如,在模拟的水下环境中,捕捉系统可以记录潜航器在不同速度和不同水流条件下的运动变化,帮助优化其导航算法,提高其避障能力和能源利用效率。
: h. }' a2 A/ }* z* S4 k8 J 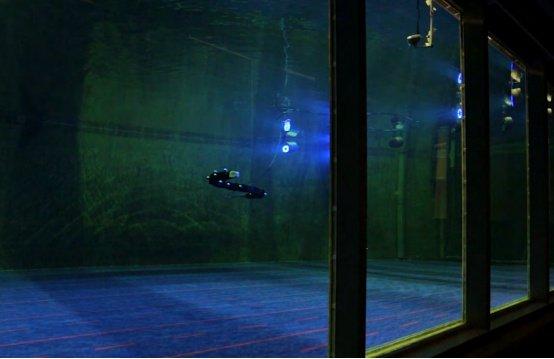
; E: o2 B; e" n+ l+ d( l0 x9 n 水下机器人的精准操控与任务执行:在深海环境中,水下机器人常常需要执行精细的操作,如抓取物体、设备维护或安装结构件。三维运动捕捉技术能够提供实时的位置信息反馈,确保机器人手臂和工具的精准操作。例如,当机器人在水下抓取物体时,捕捉系统可以实时监控其手臂和夹爪的运动轨迹,确保其抓取角度和力度准确无误,避免因误操作而损坏设备或遗漏目标。
) b8 d8 i% @. W- ~! K, _; H 
" f; w# ?! `. p( _5 p0 ~ 复杂水下作业的精确支持:海洋工程中的水下作业往往涉及到复杂的机器人操作、深水打桩、结构物安装等任务。通过高精度水下运动捕捉系统,可以实时跟踪实验环境下水下机器人和设备的运动状态,确保其按照预定的操作路径进行作业。这种实时的反馈系统不仅提高了作业的精度,还能够减少人为失误带来的风险。 5 G2 b8 ?- H0 x7 v8 C
 ! c9 d: G( ?9 U
十几年前,Qualisys推出了商用水下光学运动捕捉摄像机,这一突破性技术迅速在全球范围内得到了广泛应用,不仅涵盖了体育科学,还深入到了多个工业和影视领域。
& n" z& _2 j, q- E1 _0 A 在体育方面,Qualisys水下光学运动捕捉摄像机被用于精确捕捉游泳者的动作,为运动员提供详细的运动数据分析,帮助改进技术,提升表现。同时,在水中步态分析和康复训练中也发挥了重要作用,尤其是在康复领域,可以为医生和物理治疗师提供患者水中行走的精确数据,从而优化康复方案。 & D0 b9 B. W# j4 j! F/ ~3 H
工业领域中,Qualisys水下光学运动捕捉技术同样表现卓越。它被广泛应用于拖曳水池和造浪水槽等模拟水下环境的工程设施,用于评估水动力学性能和工程测试。此外,在海洋工程领域中,该设备帮助工程师们在复杂的水下环境中精确捕捉和分析各种运动数据,为大型水下设备的设计、测试和评估提供了宝贵的参考信息。
5 i; z' Z0 h1 D1 L Qualisys的水下运动捕捉技术还被应用于影视制作和动画领域,通过捕捉演员在水下的真实动作,动画师能够更加生动和逼真地呈现水中角色的动作细节。这一技术极大地提升了水下场景在电影和动画中的表现力,使得水下动作更加真实可信。
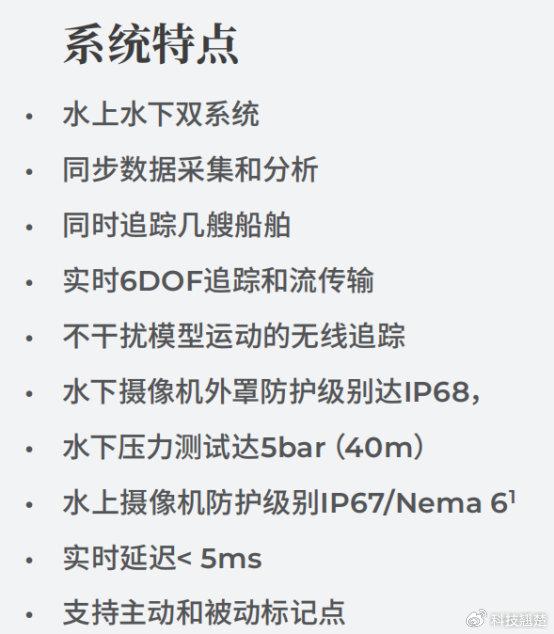
& k/ m8 W0 w6 | Qualisys水下运动捕捉摄像机坚固耐用、操作流畅,独有的产品设计,平衡了体积和重量,令摄像机在水中呈中性浮力,方便水中安装。 同时,摄像机经过40m水压测试,保证其安全地运行,与Qualisys其它平台的摄像机一样,水下运动捕捉摄像机能同步外接硬件,满足不同的研发需求,利用QTM将3D和6DOF数据实时传输到第三方应用中。 . Y$ T: Q( [7 @; k
在水下运动捕捉系统的应用中,针对不同规模的工作空间,Qualisys提供了多种摄像机选择,以满足用户的特定需求。对于大空间的水下捕捉环境,如大型泳池、造浪水槽或海洋工程测试池,推荐使用Arqus A9UW或A12UW摄像机。这两款摄像机专为广阔空间设计,具备卓越的捕捉精度和强大的覆盖范围,能够高效应对大规模的水下运动捕捉需求,其强大的性能使其特别适合复杂的工程测试、海洋技术研究以及大规模的运动科学实验。 - ]0 H3 L1 W$ F+ m+ ^- s% F( j5 c! U
 0 Z- O- q2 m" `7 _( d# g8 m2 f- ~
△Arqus Underwater摄像机适合中长距离的测量范围到达30m。 - S) H$ n6 Y& ~
而在较小的水下空间,如较小的实验水池、康复训练设备或水中步态分析实验中,Miqus M3UW和M5UW摄像机则是理想的选择,依然保持了卓越的精度和可靠性,非常适合用于需要高分辨率数据的水下运动分析或生物力学研究。
: u) |8 G0 e% s2 p 
" w! y% _# M a: U, W% | △Miqus Underwater 摄像机适用于中小型测量空间,范围可达15m。 ( `9 v' u2 X3 y
无论是大空间还是小空间的系统,都可以选配Miqus Video视频摄像机,以进一步丰富系统的功能。 : ^4 Y$ T# u) H- _& k
在实验期间,光学运动捕捉系统不需要连接到船舶。摄像机通过船舶上轻量标记点追踪船舶的6DOF位置和方向。位移精度可以低至1mm,旋转角度的精度低至0.1°,根据空间大小而有所不同。通过Qualisys实时SDK,能将刚体数据实时传输到外部应用程序。 + K8 z4 u: u0 k4 L% O2 ^
 ( x3 S) j/ e4 {0 }/ Y9 H
高精度水下光学三维运动捕捉技术的广泛应用和不断突破,标志着人类对海洋认知水平的进一步提升。通过不断创新和完善这一技术,不仅能够有效提升海洋工程的安全性和效率,还能够更好地应对全球海洋生态环境面临的挑战,为保护和利用海洋资源贡献更多智慧和力量! " \8 F7 z% n# L

2 c* v n7 {& F$ V' m6 F& i4 b, r7 Q3 K) g& {* t D
. }! m& J% k& c% L( R5 S+ C+ H
$ V1 p$ T/ o3 V' h; ]8 }
7 k$ I8 d G) G& ]1 x8 Y8 W( c! D
: j6 B0 D& T( B) B5 P& U" F+ N% n, ?' s
/ \4 H6 m0 a; O3 d* \
& ]! l2 Z$ e: r. U5 ^4 j- H! I/ X- Y# ~# ]' V
5 D6 G4 H8 b5 k5 T- k5 G* g4 i | 

