摘要
( O( Q! O/ e. t& H) o* d4 W" d# [1 ?( v: b X
水产养殖实验系统中,投饵装备受振动和潮湿环境等因素的影响,易发生称重不精确,饵料粘结等问题。设计的投饵系统克服了称重不精确、饵料易粘结等缺点,同时简化了结构,提高了效率。在宁波大学中试基地进行样机试验,在拟定的工况下,定量误差控制在4%以内,该系统能较好的应用于水产养殖实验系 统,同时也为水产养殖装备的研发提供一定参考。0 l: \- I: l3 E/ m# g
4 f/ I/ q* H0 q6 V+ |
4 R* O+ \+ n5 ?/ O+ Q# ~
关键词
' ^' D2 j% g6 e9 S水产养殖; 投饵系统; 养殖设备
& z$ }$ _# p9 G7 h, v
* g/ s1 S. k2 ?近年来我国水产养殖业有了很大的发展,投饵方式和自动化程度有了很大程度的提升。在投饵方式上,主要有螺旋输送式、离心抛投式、振动下料式等[1-3],在定量方式上,主要有称重定量式、转盘定量式、套筒定量式等[4-5],在自动化程度上,主要由单片机配合不同的传感器,控制投料动作。国外有采用音响集鱼式投饵机,电脑控制的随温度和阳光变化自动调整投饵数量的投饵机等[6-7]。目前针对工厂化水产养殖自动投饵系统,袁凯等人已经做了相关研究[8],但面向小批量水产养殖投饵试验时,受振动和潮湿环境的影响,当前投饵系统仍存在行走时称重不精确,称重时饵料易粘结等问题[9]。针对这一系列问题,本文提出了一种集自动行走,定量投饵于一体的投饵系统,该系统克服了常用行走式投饵装置行走时称重不精确,称重时饵料易粘结等缺点, 在保证性能的同时简化了结构,提高了效率。试验表明,该系统能较好的应用于水产养殖投饵试验,同时也为水产养殖装备的研发提供一定的参考。/ a0 _8 E1 B7 C. t8 z1 V0 i' p
01
( c& v- q0 u1 N( Y% h- i设计方案0 |! J0 ~/ `5 q. N
' i7 j+ E0 j: f8 Z8 C4 ?3 A5 }/ w: f1 T1 g
1.1 设计思路 9 R" c- Y0 v5 s3 e5 e) `2 w! o
不同于投饵位置固定的投饵模式,搭载行走机构的投饵系统,边行走边称重,导致称重不准确[10]。此外,由于工作 环境潮湿,易导致饵料粘结。为克服上述问题,提出以下设计思路: 4 i. q3 V' e, D8 S: {: U4 d
(1) 选取合适的传动方式,以便行走机构在运行过程中,产生振动幅度更小。
3 U. r" \! {+ O" g" X: C' ](2) 优化传动装置的基本结构,促使传动过程中产生的振动幅度尽可能降低。2 R2 C% z) ]# Y9 y, o
6 }3 y* M: v2 g5 \; g' F
1.2 基本结构及工作原理
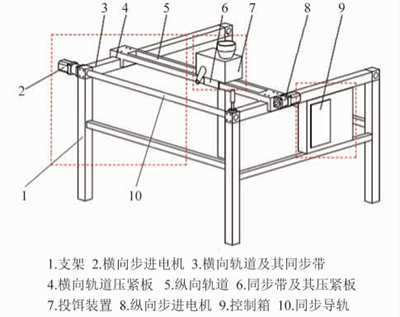
' i. b8 J) o2 `; q+ N* @) W投饵系统的总体结构示意图如图1所示,主要由行走机构、投饵装置、控制箱三部分组成[11-12]。
: y) [) z! u$ T- B6 B* z+ ]( D$ b
D# V) P- X* J1 @▲图 1 投饵系统结构示意图
# C& C- Y9 v( |" l6 w行走机构主要由支架、横向步进电机、横向轨道、同步带、纵向步进电机,纵向轨道、减速齿轮组、同步带压紧装置、同步导轨等组成。横向轨道设立在支架之上,左右各一条,在左侧横向轨道的一端安装有横向步进电机,横向步进电机的输出轴连接减速齿轮组,减速齿轮组输出轴连接同步导 轨,同步导轨的两端分别连接有一条横向同步带,同步带与压紧装置配合,并驱动压紧装置在导轨上滑动。纵向轨道的两端皆安装于横向同步带压紧装置之上,二者通过螺钉固定连接; 纵向轨道的一侧安装有纵向步进电机,纵向步进电机连接减速齿轮组,其输出轴带动纵向同步带,同步带与纵向压紧装置配合,并驱动纵向压紧装置在纵向轨道上滑动; 纵向压紧装置与投饵装置通过螺钉固定连接。其基本原理如下:
: G. o+ V8 V! n当控制箱9驱动横向步进电机2工作 时,在同步导轨10的作用下,驱动同步带3( 左右各一条) 工作,在横向同步带压紧装置4的配合作用下,带动纵向导轨5沿横向导轨滑动,同时,控制箱9驱动纵向步进电机8工作,通过同步带带动纵向压紧装置6运动,压紧装置与投饵装置7一同沿纵向轨道5滑动。在控制箱的协同控制下,投饵装 置可在横向轨道和纵向轨道覆盖的矩形范围内移动并投饵。
+ Z( n5 ~2 R, w: T5 ~- O* h4 \6 {4 ~" d( x4 r6 w% D$ Y+ @- g
: Y/ _8 T5 Y- v7 v: a' j( O02
2 O2 ?2 w# L& ?5 v% R硬件设计结构7 K1 b6 E7 Q' S& q
" L* l/ I3 P0 z$ ?: O7 ]) `
7 R5 v3 a! y9 v9 q8 r; |" X" D2.1 设计思路 . l5 \4 E+ g& L
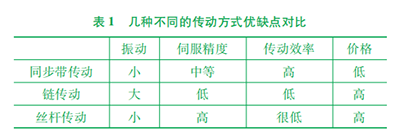
行走机构主要功能是将投饵装置输送到到指定的位置。其设计的关键有两点: ① 最大程度减小振动,以便于提高投饵定量精度; ② 使用合适的材料,较好抵抗腐蚀。在选材方面,支架选用4080铝合金型材,导轨选用6063高强度铝合金型材,铝型材具有较高的强度,其表面经过氧化处理后,耐腐蚀性能极好[13]。导轨接触面采用高精度轴承钢光轴,耐 磨性好。在抗震方面,通过比较几种常见传动方式[14-17]见表1,最终选用同步带传动。 / J" m/ X0 j+ P9 k! [- O# u
( X$ ~) @' r: ^6 j9 z
本设计采用步进电机,控制简单且有较好的位置精度,输出轴连接两对减速齿轮组,如图2所示。
; S9 i2 ?# O, j+ |. m/ x9 M 3 g+ `1 V J% D" I. V
4 t. r) I4 L' T# B4 {▲图 2 传动机构示意图
5 C; q5 j- T3 U/ U1 t9 r9 z同步带轮直径为 0.06m,设计行走机构的运行速度为20m/min,由此选择合适的步进电机参数。同步带压紧装置 如图2(b) 所示,滑块10可在导轨7上相对滑动,滑块的驱动 力有同步带8提供,同步带上安装有一同步带压紧板9,该压 紧板在工作时,通过压紧同步带,将同步带传动过程中产生的振动进行吸收,极大程度提高抗振性能。 / W7 z( ?# O' w7 M
% Z) N3 y; j @- p0 ?) R; S1 k( J$ w# ~) X5 J* g
|7 C% z' \8 v5 h2.2 投饵装置
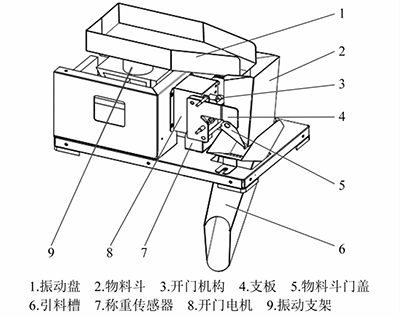
0 R6 @- z0 h$ Y/ W! p# c; o投饵装置关键结构如图3所示,主要由振动盘、物料斗、 支板、物料斗门盖、引料槽、开门机构等组成,本装置由德兴 牌茶叶分装机改装而成[18]。% t! Q# r1 X" n
+ ~6 A! Y' S+ P% z Y2 u
▲图 3 投饵装置结构示意图
, F' `( u: E- d0 U( e8 J该装置的基本原理如下: 手动设定称重质量后,饵料进入振动盘中,振动盘在激振器的作用下开始振动,使饵料慢慢的滑入物料斗内,物料斗上安装有一称重传感器,通过感应物料斗整体质量的变化,可计算出物料斗内饵料的质量,从而实现定量称重。称重完成后,由PLC给下料信号到投饵装置控制器,将称完重的饵料通过引料槽下料,下料过程中,由下料电机提供激振力,驱使饵料离散下料。 5 k |0 |& g2 p, J2 P8 z% w; y
开门结构主要由一曲柄摇杆机构组成,该机构将电机的转动转变成物料斗门盖的往复摆动。根据电机输出轴转动的行程,可知摇杆的运动状态,从而能实时控制料斗门的开启与关闭。
3 Q* J7 ?3 E' @8 F4 m5 v4 l6 P
7 ^" Y& P: F) z+ h4 p4 c2 W+ W( k# Y
0 ]8 E7 Q1 F7 X9 a9 {5 [) o* g( h$ H0 n
2.3 控制系统 & p0 n! A$ s7 P. T
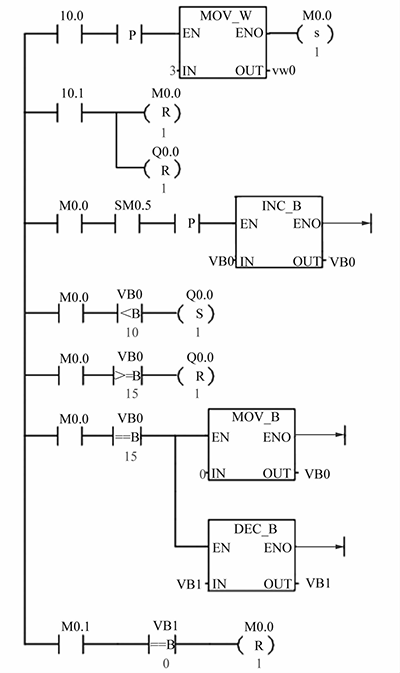
控制系统是由西门子S7-200PLC搭配步进电机驱动器组成,该部分中行走机构控制梯形图如图4所示。
+ L0 y/ O6 M$ A0 _3 p0 L
! L" j" |5 _+ h+ k" h9 x/ c2 `- l▲图 4 行走机构控制梯形图
4 b* A8 h4 E- v% j6 v4 `其系统控制过程如下,PLC发送指定数量的脉冲信号给 步进电机控制器,步进电机驱动器收到脉冲信号后,控制步进电机运行一定的转数。在行走机构控制过程中,先驱动横向步进电机运转,横向步进电机运转结束后再驱动纵向步进电机运转,此时行走机构运行到指定的位置点,若还需运行至其他位置,需重复上述控制过程。
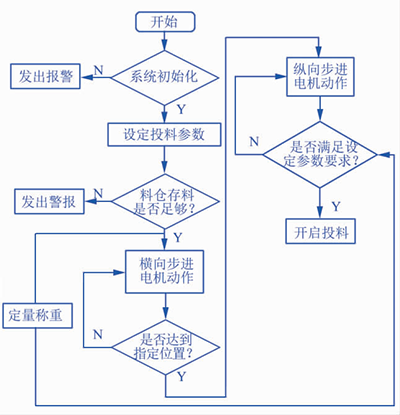
" x# w! x0 e) s6 q6 \整个行走机构的控制过程可分为三种模式,第一种为手动模式,即通过手动控制按钮,控制行走机构的水平竖直行走,该过程可到达范围内的任意指定位置; 第二种为定步长模式,即通过设定固定的横向与纵向步长值,行走机构每次都以该值为单位行走。第三种为传感器模式,在投料点安装红外传感器,行走机构到达传感器位置,接收到传感器信号后停止行进并进行相关操作。为了方便操作管理,开发了一套基于昆仑通态TPC7062TI触摸屏的人机交互界面,通过modbus协议[19]将触摸屏与行走机构控制器进行通信。在触摸屏上可设定行走工作参数。整个控制系统的流程图如图5所示:
8 c2 c) }) U# d$ T. r6 H( u3 f" v/ f
+ S' x7 o2 _" I% U- x, O▲图 5 控制系统工作流程图
: D# d# \9 D* A
2 \ ~% q& `; K' ~# b032 M4 X) h7 J8 c- \1 d
投饵系统试验分析9 T; G$ P& a( b, L o
$ g/ z- C/ a6 T3.1 试验环境
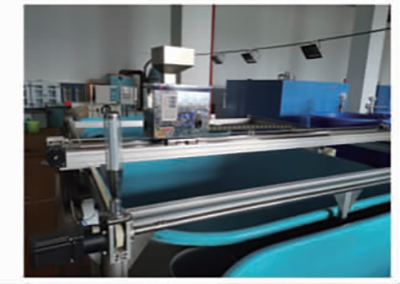
/ u; N: r3 x' p9 ?" u本试验于2020年9月在宁波大学中试基地智慧养殖实验室进行,投饵系统现场试验图如图6所示。考虑到实际养殖过程中饵料直接抛投到水中不便于测量质量,本次试验在养殖池不蓄 水的情况下进行,用容器收集每次抛投下的饵料,便于测量饵料的实际质量,提高测量精度。5 l: {6 ?7 J! F1 n' b9 J4 g, A
3 b) U+ F, Y3 {0 v# Y
1 T3 B0 E1 l8 A" }/ k- T/ E▲图 6 投饵系统现场试验图
* D d/ q5 S- o. x2 A
4 B3 _2 J) |( S! Z( \0 y+ }
1 [) b! r7 L- v; g" o9 _- A
- ?1 D0 s. x n& k! M' U- t: a6 n* U# l5 Y: g
3.2 样机性能试验结构及分析 # P8 S* c1 O% H9 ~, W& h* J% y- W
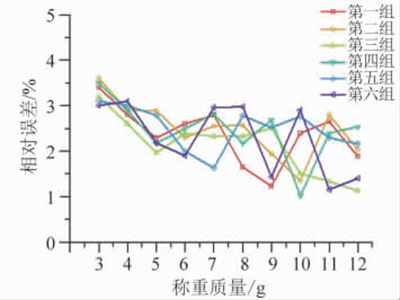
试验过程中,以三疣梭子蟹养殖实验为例,由于梭子蟹成长到 V 期后才会进行单筐体养殖,这一阶段三疣梭子蟹体重在70g~200g之间,对应投饵量占体重比例大约为3%-8%[20]。故按此设计,将投饵量设置在3g~12g 之间,且分梯度进行测试,本次测量采用恒兴牌蟹饲料进行测试,测得的试验结果如图7所示。
: n6 k: i# I& Z$ Z; x$ H
s% g! @/ Y' T0 f S7 l( x# z▲图 7 投饵装置定量精度测试结果 7 d- `4 p" q/ C2 [ H, p( |
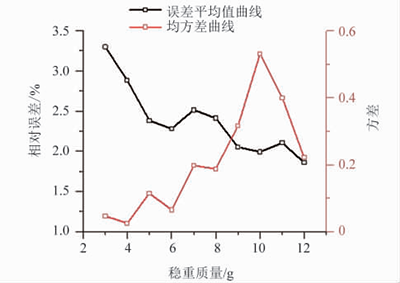
将上述六组相对误差求得平均值,计算其方差,并绘制成曲线如图8所示:
9 H4 j0 m# n6 V% P5 u4 }
5 ?- Q5 R" K0 i$ T, C% v▲图 8 投饵装置误差数据分析
' w! M6 O6 r4 U0 B- f! w$ d& M. p% _
) H7 O* @& P( b+ r1 b h
3.3 结果分析 & `& z$ n+ J( w# L
通过分析试验数据可知,实际投饵量与理论投饵量存在一定误差,在设定的投饵量范围内,误差不超过4%,具体来 说,投饵量越大,误差越小,但误差始终存在,从方差数据可 以看出,误差的波动幅度较小,方差值均小于0.6,在平均值 附近波动。造成该误差的主要原因有: ①行走装置在工作过程中会产生振动,该振动幅度虽然很小,但仍然会产生影响; ② 投饵装置在定量称重过程中,由于自身的精度问题,会产生误差。按照70g幼蟹摄食量占体质量波动范围2% 计算,可满足梭子蟹水产养殖过程中定量化投饵的需求。. M( b. n. J; v/ d+ M
$ a- L2 T' P1 o- v9 B
2 e' d" d: Q+ J0 U/ P! s' CCONCLUSION
1 y! Y$ |3 P g结论. t E# u5 R' Q1 e5 Q' p# V
/ r# b: q3 x U9 R" D* A/ C k- \
本文基于PLC控制器设计了一套适用于水产养殖试验的自动投饵系统。该系统克服了常用试验环境下,振动和潮湿等恶劣因素的影响。在养殖基地进行投饵试验,饵料定量范围设置在3g ~12g间,实际投饵量最大误差不超过4%,可较好满足水产养殖试验系统要求,同时也为水产养殖 备的研发提供一定参考。/ z% p; A# P% H7 D% P/ R9 M
. ~8 B0 }7 K7 k2 F0 a4 h该文章来源互联网,如有侵权请联系删除( c. A. [4 q5 z/ Q0 k0 d6 U
查看原文:www.52ocean.cn | 

 ! {2 n2 K! i. z$ N8 m* Q2 Y* H
! {2 n2 K! i. z$ N8 m* Q2 Y* H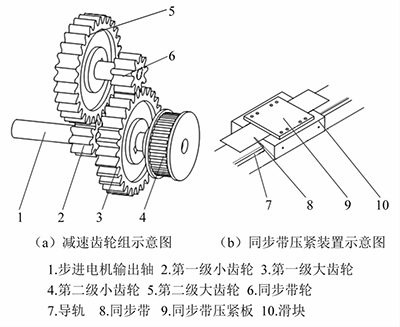
 * g, q& W( R9 @0 |* a/ f% ]
* g, q& W( R9 @0 |* a/ f% ]