|
3 C# l7 S( g, U% E- h6 t6 d
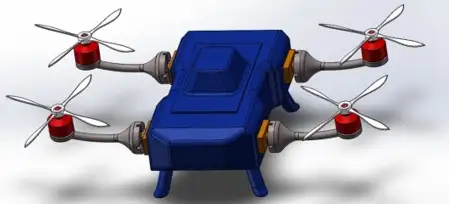
该飞潜器设计是当年大二时和队友们一起做的一个项目,一共做了一年多,共设计了4个模型。最终毕业时我选择了我主要设计的一个模型作为毕业设计,并对其进行了当时学识所及的理论分析。完整论文以及仿真模型如下: 3 e6 D. N" S' Z% Y9 ^
( U% w& F* B: h0 F K0 F
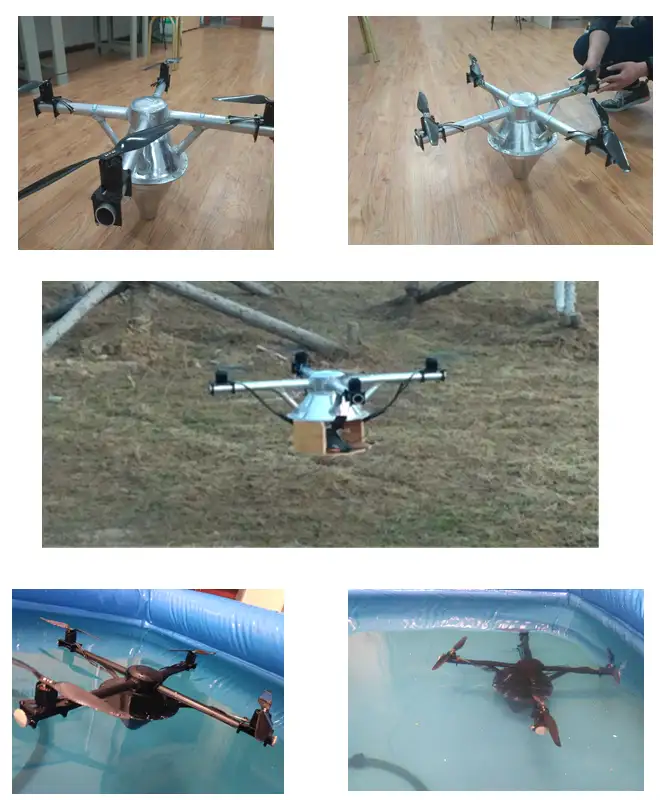
其中第一代:
; j1 A9 b* M9 t) @0 t' b
" H; c1 b, s0 y
3 W. `; ?' p4 U6 ?& V) W# L0 a 第二代: $ S4 z6 S+ s/ O' g I( }* f
8 n" y+ c* E% H/ o( t
* ?- f) X9 k6 C7 C/ Q 8 w4 L! \8 h% A7 z) p* p
第三代: : l" O2 H; r# e: k
1 W4 Y4 w2 q9 u# L$ y8 f* t
/ G3 Q$ |& q& S9 `
" w: b: V# t7 C+ m( H7 v
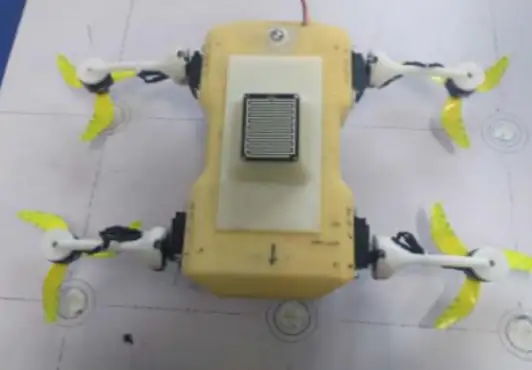
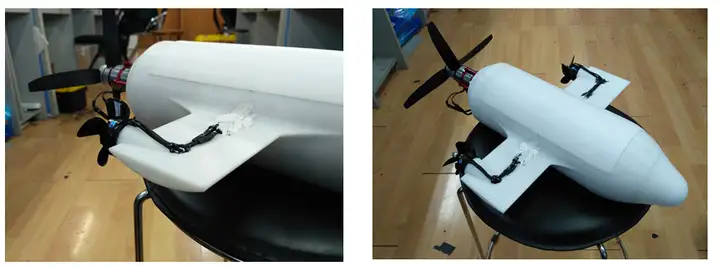
& D- u1 ^9 g2 Q 第四代:3D打印回了模型,但是没有然后了 4 S; P. {* N; x- b0 {+ y0 a' P
6 D. Q5 y1 F( D9 T5 L& \& |
. y5 ?( j- Y9 j0 {( d) U0 p$ E 一、飞潜器简介 : d4 U' G+ H" n, ]5 Q" q
飞机与潜艇属于两个不同的领域,飞机机属于航空领域,潜艇属于航海领域,二者差异很大,但是又有共同点,两栖飞行器的研发正是融合了航空和航海的于一体,使得飞行器既可以在空中飞行又可以在水下潜行。由于飞潜器能够穿梭于空中和水中,具有极强的机动性、环境适应性及隐蔽性,在军事上有着重要意义,可以用作单一作战武器、侦察和通讯武器、海上巡逻、海上空防、通信中继、突袭、反潜等。民用方面,飞潜器可以用作生态环境检测、矿藏勘探、海图绘制、海上水质检测、近海面摄像、动植物监控、气象数据获取、辅助海洋工业、海底电缆观察等方面。由此可见飞潜器的用途十分广泛,并具有很多独特的优势。 % n0 x& t3 i9 L7 x, Z
飞潜器在搜救领域有者巨大的潜能, 小型无人飞潜器用于海洋资源勘探相对于传统的无人自主水下航行器有着非常明显的优点。现阶段所用的水下自主航行器是通过船舶运输到指定的水域后再将其放入水中进行探测,而飞潜器则可以在远处遥控飞往指定水域后再潜入水中进行探测。相比之下飞潜器节约了船舶运输成本,明显的缩短了勘探时间,节约资源。再者,由于飞潜器的特殊性能,它能勘探的范围更广,而且极为灵活。飞潜器的结构较为简单,故障率相对降低,研发和维护成本较低,在多探测器系统组织、交互等方面有着得天独厚的优势。 1 ?; v1 ^3 u+ S6 z
二、飞潜器结构 . X# S9 R. B$ W g, ~, v# f9 X
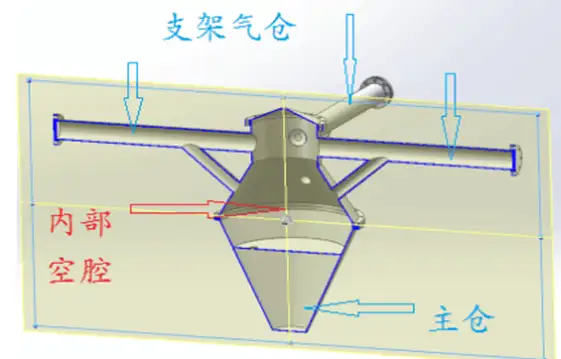
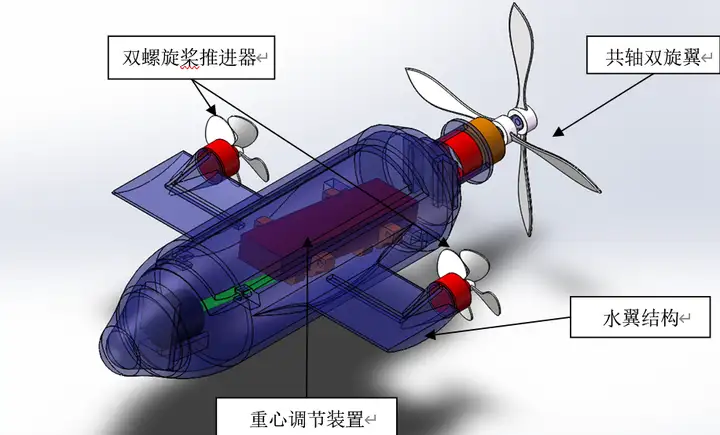
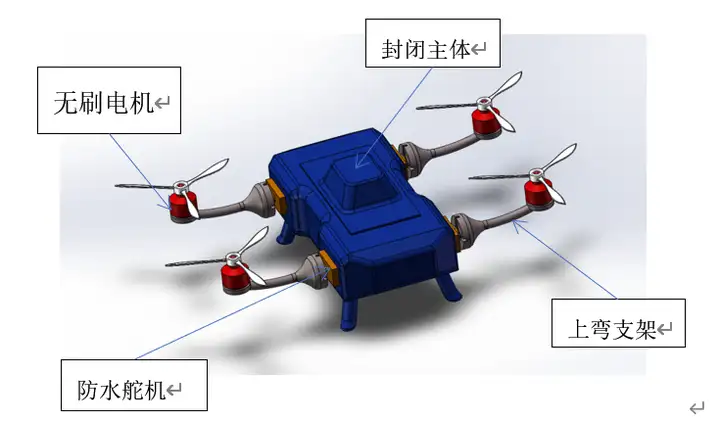
在对一些资料中的飞潜器模型结构分析后发现现有的飞潜器结构都比较复杂且体积较大。近几年无人四旋翼飞行器发展迅速,其简单的结构让它的机械稳定性非常好,且维护简单。在一些文献中,作者提出通过对比现有的各种飞行器和水下航行器的模型,提出了一种无人水空联合飞行器,该飞行器为四旋翼结构,拥有两副螺旋桨,分别应有与空中和水中的航行。在国外的一些视频中也有用对桨四轴八桨飞行器设计成飞潜器,使之能够做到空中飞行和水下航行。受到该模型的启发,提出了一种只有一套动力装置,并且能够适应水下和空中环境的飞潜器结构。其结构如下
. L L" R4 l& J, r! C$ ?- p' W5 q 图1 整体结构飞潜器在同四旋翼飞行器在空中飞行,如图2所示。而在水下航行时,四个螺旋桨反转过来,形成向上的推力,克服飞潜器在水下所受的浮力,并且通过控制四个螺旋桨的推力改变飞潜器的运动姿态,进而改变飞潜器在水中的运动轨迹。飞潜器在水中运动状态如图3所示。
; Y! ]0 v1 L- I' E7 x/ P 图2 飞潜器空中运动状态图3 飞潜器下潜状态以上就是飞潜器的主要介绍,包括其形状以及运动方式。 ( m) F9 y9 w1 R; g; e- ]3 H3 ]% u' R
下面几篇将介绍该飞潜器数学模型的建立与一些仿真。
0 R$ r. j4 Z' M0 @4 z
A3 N1 f2 A5 q0 f+ b. @; e: a, s4 @% \1 s4 \) W9 `
: M$ S, ]& t# d v$ i: r2 a* O, L8 P
|