自主导航-带或不带全球导航卫星系统$ o8 S; [" P; F. ]+ N
' g( [$ n( N7 c6 r; X. {( \. |7 E% E5 T' k1 I$ Z
- . M8 c: q [4 `3 Q$ P5 [
- , M5 {" E& w8 I; s7 n( x
2 G" {/ f1 G# F3 @9 d4 ^
4 T/ b2 k ]& ^$ i- Sonardyne的SPRINT Nav用于DASA演示项目的SEA-KIT X级。照片来自Sonardyne。
# @2 M- f6 B1 n' D) {4 F+ z - 用于USV导航的SPRINT Nav轨迹与当地GNSS RTK进行了对比。Sonardyne的图片。
% M' Y1 M% Q* E( k7 k1 k
4 r* f* o: @" R( M6 f: |使用非载人水面车辆(USV)作为作战工具本身的吸引力正在增加。从港口巡逻到海上风电运营,无人潜航和自主航运被视为降低成本、降低人类风险和减少碳足迹的机会。
$ h7 S: Q/ ~; {6 K$ P但他们不会;Don’没有挑战。因为他们;由于无人驾驶且需要远程控制,我们甚至更加依赖于船上的精确导航系统,而目前这在很大程度上取决于全球导航卫星系统(GNSS)。4 u6 v! k; ^( r* I. O
作为主要导航来源,全球导航卫星系统得到了很好的利用,但在某些情况下,单纯依赖它可能会产生一些风险。这可能是在桥梁下、繁忙的港口或风力涡轮机、海上平台或港口基础设施等重要结构附近过境时,全球导航卫星系统星座的视线丢失的地方。其中一些领域是您最不喜欢的;我不想失去信号。另一个风险;s不太可能,但仍然存在干扰或欺骗,有人故意决定干扰GNSS信号。' b$ s2 r2 ~! z' x8 c
这些是;没有新的问题,至少在陆地上没有。一段时间以来,我们道路上的自动驾驶或自动驾驶汽车一直在开发各种功能,以确保安全准确的导航。他们;重新使用融合了摄像头、雷达、车载传感器和惯性导航系统(INS)技术的传感器套件,以确保这些车辆仍然知道自己在哪里。使用具有诸如GNSS和激光雷达的多个辅助输入的INS允许更好地识别观测数据中的误差或异常值的能力;则可以拒绝这些观察结果,从而提供车辆的更可靠和准确的导航。
9 R# r C: ]' X# k: c) f& m% X海上领域的USV也采用了类似的方法。在这里,额外的惯性和声学传感器现在被用来帮助支撑导航,这样无论是否有全球导航卫星系统信号,船只都能知道自己在哪里 在某些情况下,可以识别并拒绝错误的异常GNSS位置。一些示例可能包括校正数据的临时丢失或来自附近结构的短期多径或星座阻塞。
% V9 D7 j8 R* A6 h. n2 BUSV的方法略有不同,但它;基于我们今天已经掌握的技术;即用于水下航行器的混合制导和导航系统。这些技术已在遥控潜水器(ROV)和自主/无人水下航行器(AUV/UUV)等系统上开发和使用,这些系统无法使用全球导航卫星系统定位进行导航,因为所使用的信号在水中传播不畅。这意味着水下系统需要它们自己的惯性和声学传感器来计算它们的位置。
X9 S0 v( s8 g- L @, P一种常见的方法是使用多普勒速度日志(DVL),它测量车辆的速度;相对于海床的速度;It’他正在旅行。但DVL的一个误差来源是,它们不能对车辆运动进行最佳补偿,而且通常大多数(如果不是全部的话)换能器都需要接收海底的回波来计算速度。这意味着需要通过使用单独的定向仪器进行运动补偿。此外,DVL需要与它将要使用的其他仪器正确计时,并在车辆上正确定位。水下航行器还需要知道它们的深度,因此压力传感器也必须集成到这个组合中。它可能会变得非常复杂,非常快,如果这些元素中的每一个都有一个小错误,这将传播并产生可能不再适用的系统错误。
. t2 c1 A/ Y: V' y<hr>SPRINT Nav安装在SEA-KIT USV的下侧。图片来自SEA-KIT。3 Z0 o1 }" ?9 x9 C& I. s' Z
<hr>传感器融合混合导航
3 ~/ L7 b0 S8 B# w' z, ]5 \7 T9 d9 ~2 x$ p/ `
解决这个问题的方法是使用一个单一的仪器,在非常低的水平上结合DVL和惯性导航系统(INS)。这;SPRINT Nav是我们所说的混合声学惯性导航系统,其中INS和声学(即DVL)以及高度精确的压力传感器在物理和算法上紧密集成,以创建一个单一的高性能导航解决方案&nbsp;' C' u* p4 O$ ^; i4 J4 T5 o. C
SPRINT Nav使用SPRINT INS和Syrinx DVL。因为单个SPRINT Nav仪器内部有一个INS,它可以最佳地补偿DVL的运动。它还需要更少的波束来导航,因为INS使用单独的波束观测,然后它决定是否;根据波束数据的准确性,它将使用或拒绝它们。它可以做到这一切,因为它已经对自己的运动有了一个概念,并且已经有了什么有效,什么无效的数学模型;t、 DVL本身没有;我没有。
/ w1 K! T& A1 [+ O% [这种紧密耦合系统的好处是:单独的波束辅助、最佳的运动补偿、完美的定时、不必执行校准或计算偏移,因为它在单个系统中进行了预校准,并且产生了比单个部件的总和更高的性能。
3 H/ c8 K1 v3 j! [! ?% E该理论是好的,该系统已在全球ROV和AUV系统上得到验证;从最苛刻的调查ROV操作到远程AUV。但是部署在USV上有多容易?
6 _) U |) @% d' k0 ~6 l' @, ~6 o4 t$ H) S+ E7 M0 y
9 I t5 A6 {9 c6 H4 W2 C国防演示器+ x; s9 y5 {, g0 N0 i
其实很容易。去年,通过英国国防科学技术实验室(DSTL)和国防与安全加速器(DASA)资助的演示,我们与USV制造商SEA-KIT合作,展示了USV上的SPRINT Nav能力。
& l# `8 L1 o; A" C我们在12米长的SEA-KIT X级USV上的吊舱上安装了该系统,并在本地实时动态(RTK)GNSS上进行了测试。它从我们位于普利茅斯的基地被派往离岸数英里的地方执行多项不同的任务,涵盖不同的海床类型、海况、海拔和海床坡度。我们模拟了一个运输、测量线和返回静态系泊的运输,类似于测量操作中可能出现的情况,如上图所示(图1)。* N$ T, S' L9 D+ J' K
; e! K7 U0 }. O' y6 c7 d
+ S8 F& ?" L- E; \1 G5 X# A& J4 E5 _0 C
% j9 N: t6 O" g- 13小时内行驶90公里( r7 q7 L' v0 ]9 F0 T6 x2 w
- 0.5和70m水深7 c: j# E+ h1 Q8 r5 v$ U
- 超过2m的涌浪和20度的侧倾& o* M8 P. N$ v9 O
- 浅梯度和深梯度$ L' X4 ~( ?; S' R5 w' @$ |6 n
- 狭窄的河道,强烈的潮汐/水流
. x- g3 U& l% b5 v$ _ - 泥土、岩石、沙子和卵石3 I! I: `: }* g8 p3 a
- GNSS RTK参考比较好,只有几厘米。4 M2 w- ^/ z7 B8 _
9 s! B' P2 v- [$ }( g& V& R
" ]% B& w9 a" `图1中的底部图显示了没有外部辅助的SPRINT Nav和参考RTK GNSS之间的位置差。长时间运行35公里的总误差仅为1.8米。这相当于行驶距离的0.0051%,就商业产品拒绝GNSS导航而言,这确实是前所未有的。事实上,在这么长的时间内,没有一个USV任务可能没有GNSS修复,但它表明了可以实现的准确性,以便克服和交叉参考任何GNSS问题。: u. }2 J7 N7 i
演示还着眼于静态操作,即站点保持。该船在16小时内一直保持在1米左右的距离内。在这段时间结束时,误差在1米以内,这表明静态应用程序的性能也很好。
8 D' `0 V8 j _事实上,船只可能试图在非常靠近海床障碍物或海上风力涡轮机等结构的地方使用这种能力。因此,我们还演示了如果一些DVL波束被结构遮挡而无法到达海床会发生什么,SPRINT Nav即使在多个波束不可用的情况下也能够实现高精度。
2 E! q7 v/ T) {" A, ]8 h& P; W<hr>海洋无限。海洋无限;阿玛达舰队的第一波将安装SPRINT Nav。图片来自海洋无限。
4 y {, F0 H5 g+ e<hr>" q( I$ Y% x+ y6 a
建立ADCP能力: @8 X8 t, T" `/ G
在支持USV导航的同时,我们;ve还在SPRINT Nav中构建了声学多普勒海流剖面仪(ADCP)功能,深度可达80米。这使得能够在波束水平上收集水柱数据,而不会干扰DVL&rsquo的;s的底部跟踪能力,因为这两种模式可以并行运行。同样,由于SPRINT Nav对其运动和位置有高度准确的了解,它可以自动补偿原始数据,以在位置和补偿船只运动的情况下给出水柱的非常准确的真实世界画面。这消除了集成单独的ADCP和运动传感器数据的需要,并显著减少了动态水柱数据收集操作期间对连续和准确的GNSS数据的依赖。此外,如果您在深水中;没有底部锁定,但您有GNSS,SPRINT惯性测量可以补偿ADCP数据中的船只运动。4 g, u% ^- H( W
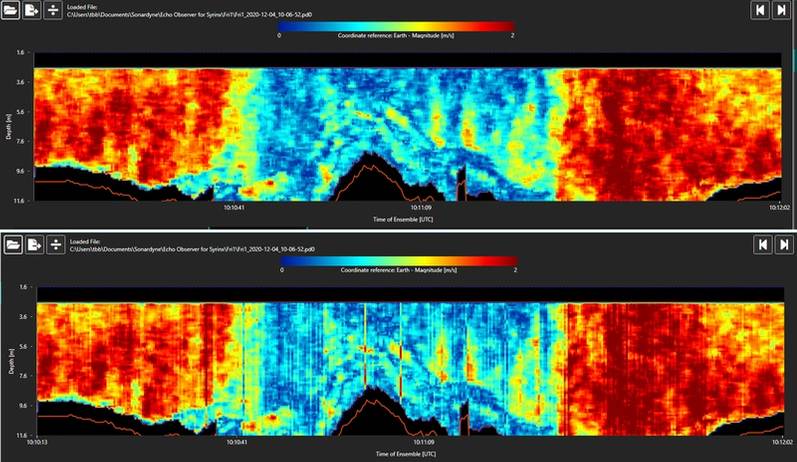
<hr>上述水柱数据显示了未补偿的原始数据(图2)和SPRINT Nav的补偿数据(图3)。颜色表示8-16m水柱上的水流速度。第一组数据中的条纹显示它尚未得到补偿&ndash;水不会;Don’不要在现实世界中这样做。第二组数据显示了补偿的效果&ndash;更现实的观点。Sonardyne的图片。
# p1 @5 W& f- Z; Q<hr>高精度导航和在没有全球导航卫星系统的情况下最佳测量水流的能力相结合,显著降低了从USV主机平台执行ROV和AUV部署的风险。
3 n6 V Q2 c/ ?5 V N j一个很好的例子是由海洋无限建造的阿玛达舰队。第一波舰队将搭载我们的Ranger 2超短基线(USBL)定位系统和海洋机器人包,这将为Armada船只的水下有效载荷机器人提供一体化的跟踪、通信和控制能力。此外,这些船只将安装SPRINT Nav,即使全球导航卫星系统服务受损,也能提供连续、不间断的导航辅助,以支持安全的远程操作。这些USV部署的水下航行器还将配备SPRINT Nav系统和我们的宽带Sub-Mini 6+跟踪转发器,它们使用与Ranger 2相同的通用硬件。
4 n( a* H2 R+ w* q# `# n7 k$ _
' z% A/ W/ s( k; u l5 Z" |9 X7 _6 ?高海拔能力+ Q# M# W7 a+ I: w2 D1 k+ T
我们的进一步发展;在过去的一年里,我们开始创建一个更高海拔版本的Syrinx DVL。在发布时,SPRINT Nav仅适用于600 kHz Syrinx DVL。现在提供了400kHz选项,可以实现220米水深的可靠底部锁定(在标准SPRINT Nav中为175米)和120米的ADCP功能。集成到SPRINT Nav中,这扩展了USV使用这种更高海拔底部跟踪能力的范围。* n+ `) p L9 r7 O
总之,USV的运营正在增加。将USV与额外的传感器集成,以减少它们在其他方面对GNSS信号的关键依赖,从而降低操作风险,尤其是在靠近基础设施、停靠站或部署或回收另一辆车时。同样,这些数据为车辆可能执行的任何测绘任务提供了高精度,以确保它们准确地补偿数据或图像,即使它;很难找到一个外部职位。8 r) m: [+ G- f- h6 @
: u. p0 s( |7 h1 `
, u |+ P$ \5 S9 e<hr>关于作者:;Malik Chibah于2003年加入Sonardyne,并于去年成为工程总监。他负责监督所有产品和系统的开发和交付,包括用于海洋自主应用的产品和系统。在加入Sonardyne之前,Malik在软件行业从事了九年的各种开发和系统集成项目。他拥有伦敦大学学院水文测量理学硕士学位。 |


 6 p8 {3 x' T: y. B# B2 w5 `, h8 v" n
6 p8 {3 x' T: y. B# B2 w5 `, h8 v" n ( a5 Q$ z1 L) z* `4 a
( a5 Q$ z1 L) z* `4 a - e/ Q# O/ |$ l$ E: H) n9 }
- e/ Q# O/ |$ l$ E: H) n9 }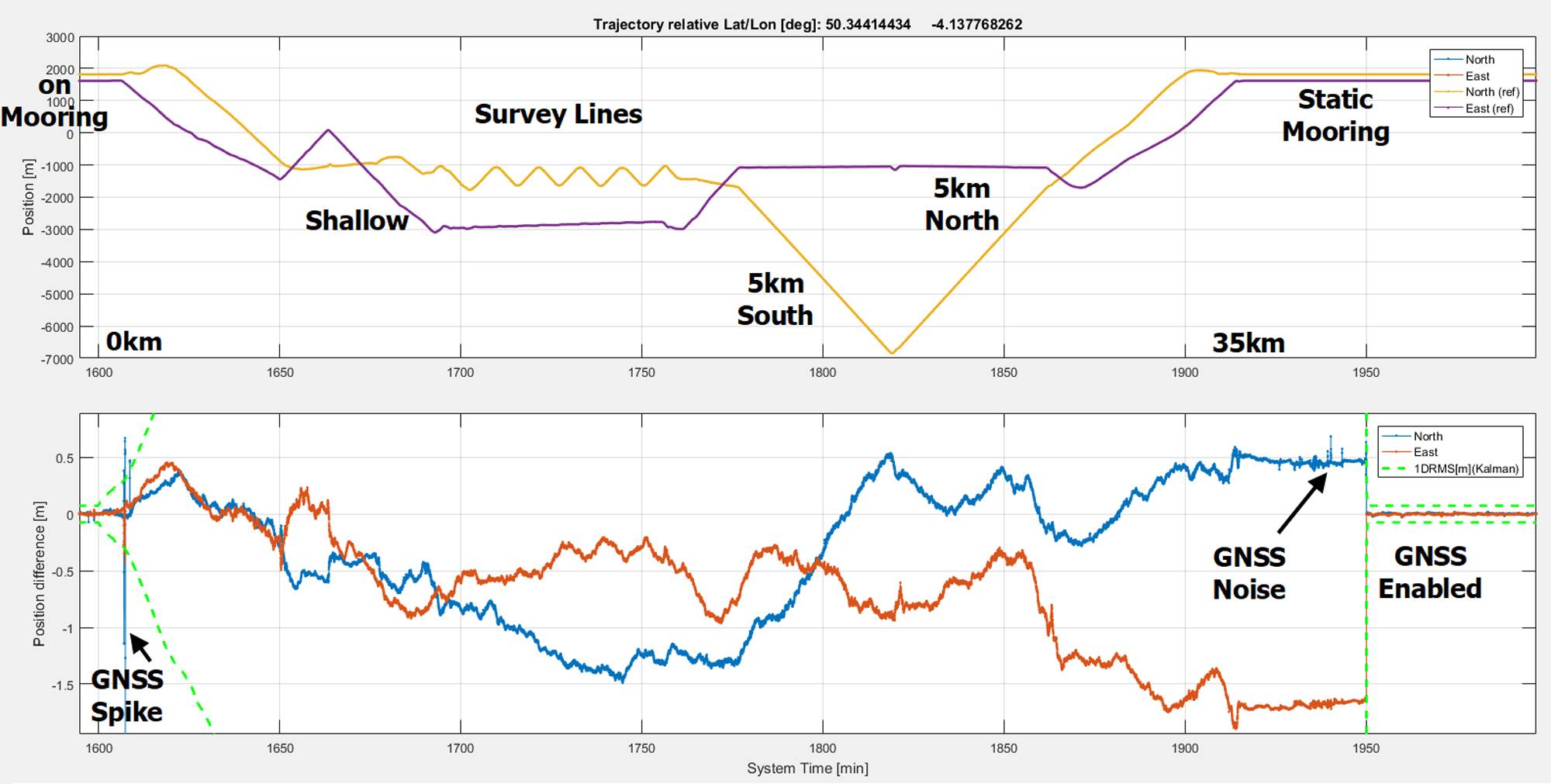 # t5 X. @# x+ A* v# t+ j! R* m
# t5 X. @# x+ A* v# t+ j! R* m